
Вступление:
Сегодня во многих отраслях промышленности используются роботы из-за их высокого уровня производительности и надежности, что очень помогает людям. Робототехника для предотвращения столкновений используется для обнаружения препятствий и предотвращения столкновений. Это автономный робот. Конструкция робота для предотвращения препятствий требует интеграции множества датчиков в соответствии с их задачей.
Обнаружение препятствий - основное требование этого автономного робота. Робот получает информацию из окружающей среды через установленные на роботе датчики. Некоторые сенсорные устройства, используемые для обнаружения препятствий, такие как датчики ударов, инфракрасные датчики, ультразвуковые датчики и т. Д. Ультразвуковой датчик наиболее подходит для обнаружения препятствий, он недорогой и имеет большой диапазон действия.

Роботизированный автомобиль для предотвращения препятствий
Принцип работы:
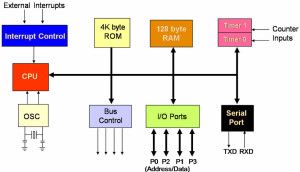
Избегание препятствий роботизированный автомобиль использует ультразвуковые датчики для своих движений. Для достижения желаемой работы используется микроконтроллер семейства 8051. Двигатели подключены через микросхему драйвера двигателя к микроконтроллеру. Ультразвуковой датчик крепится перед роботом.
Когда робот движется по желаемой траектории, ультразвуковой датчик непрерывно передает ультразвуковые волны от своей сенсорной головки. Когда впереди встречает препятствие, ультразвуковые волны отражаются от объекта, и эта информация передается в микроконтроллер. Микроконтроллер управляет двигателями слева, справа, сзади, спереди на основе ультразвуковых сигналов. Для управления скоростью каждого двигателя используется широтно-импульсная модуляция (ШИМ).

Блок-схема роботизированного транспортного средства для предотвращения препятствий
Различные датчики, используемые для предотвращения препятствий Роботизированный автомобиль
1. Обнаружение препятствий (ИК-датчик):
ИК-датчики используются для обнаружения препятствий. Выходной сигнал датчика отправляется на микроконтроллер. Микроконтроллер управляет транспортным средством (вперед / назад / стоп) с помощью двигателя постоянного тока, который установлен в транспортном средстве. Если какое-либо препятствие находится внутри, ИК-датчик не принимает световые лучи и подает сигналы на микроконтроллер. Микроконтроллер немедленно остановит автомобиль, и включится сирена. Через одну минуту робот проверит статус пути, если препятствие удалено, робот уйдет далеко, иначе робот вернется в исходное место перемещения. Датчик обнаруживает объекты, испуская короткий ультразвуковой сигнал, а затем прислушиваясь к эко. Под управлением главного микроконтроллера датчик излучает короткий взрыв 40 кГц. Этот взрыв происходит или проходит по воздуху, ударяется о предмет, а затем снова отскакивает от датчика. Датчик подает выходной импульс на хост, который прекращается при обнаружении эхо-сигнала, поэтому ширина от одного импульса до следующего учитывается программой для получения результатов о расстоянии до объекта.
два. Обнаружение пути (датчик приближения):
Нормальная причина: оба датчика выдают указания, и робот следует за ним, двигаясь прямо по пути. Когда линия заканчивается в это время, робот разворачивается на 180 и поворачивает обратно в том же месте.

Быть в сети
Датчики приближения используются для обнаружения пути. Когда правый датчик не обнаружен на кривой, микроконтроллер активирует левый двигатель, чтобы повернуть налево, пока не появится сигнал от правого датчика. Как только сигнал правого датчика обнаруживается, два двигателя активируются, чтобы двигаться вперед. Когда линия заканчивается в это время, робот разворачивается на 180 и поворачивает обратно в том же месте.

Теряя линию
3. Ультразвуковой датчик:
Ультразвуковой датчик используется для обнаружения препятствий. Ультразвуковой датчик передает ультразвуковые волны от головки датчика и снова принимает ультразвуковые волны, отраженные от объекта.
Ультразвуковые датчики используются во многих областях, таких как системы сигнализации с инструкциями, автоматические открыватели дверей и т. Д. Ультразвуковой датчик очень компактен и имеет очень высокие характеристики.

Общая схема ультразвукового датчика
Принцип работы:
Ультразвуковой датчик излучает короткий и высокочастотный сигнал. Они распространяются в воздухе со скоростью звука. Если они попадают в какой-либо объект, они отражают эхо-сигнал на датчик. Ультразвуковой датчик состоит из мультивибратора, закрепленного на основании. Мультивибратор представляет собой комбинацию резонатора и вибратора. Резонатор передает ультразвуковую волну, генерируемую вибрацией. Ультразвуковой датчик состоит из двух частей: излучатель, который производит звуковую волну с частотой 40 кГц, а детектор обнаруживает звуковую волну с частотой 40 кГц и отправляет электрический сигнал обратно в микроконтроллер.

Ультразвуковой принцип работы
Ультразвуковой датчик позволяет роботу виртуально видеть и распознавать объект, избегать препятствий, измерять расстояние. Рабочий диапазон ультразвукового датчика составляет от 10 см до 30 см.
Работа ультразвукового датчика:
Когда электрический импульс высокого напряжения подается на ультразвуковой преобразователь, он колеблется в определенном спектре частот и генерирует всплеск звуковых волн. Когда перед ультразвуковым датчиком появляется какое-либо препятствие, звуковые волны отражаются в виде эха и генерируют электрический импульс. Он вычисляет время между отправкой звуковых волн и получением эха. Образцы эха будут сравниваться с образцами звуковых волн для определения состояния обнаруженного сигнала.
Примечание: Ультразвуковой приемник должен обнаруживать сигнал от ультразвукового передатчика, когда передаваемые волны попадают на объект. Комбинация этих двух датчиков позволит роботу обнаруживать объект на своем пути. Ультразвуковой датчик прикреплен перед роботом, и этот датчик также поможет роботу перемещаться по холлу любого здания.
Применение ультразвукового датчика:
- Автоматическое переключение светофоров
- Система охранной сигнализации
- Счетчики доступа выключатели парковочные счетчики
- Задний гидролокатор автомобилей
Особенности ультразвукового датчика:
- Компактный и легкий
- Высокая чувствительность и высокое давление
- Высокая надежность
- Потребляемая мощность 20 мА
- Импульсный вход / выход
- Узкий угол приема
- Обеспечивает точную бесконтактную оценку расстояния от 2 см до 3 м
- Светодиод точки взрыва показывает оценки в продвижении
- 3-контактный разъем упрощает подключение с помощью ссылки разработки сервопривода
Применение роботизированного транспортного средства для предотвращения препятствий:
- Особенно военные приложения
- Может использоваться для городских войн
Теперь ясно получил представление о концепции роботизированного транспортного средства, использующего ультразвуковой датчик обнаружения препятствий, если еще какие-либо вопросы по этой теме или концепции электрических и электронных проектов оставят комментарии ниже.
Фото:
- Общая схема ультразвукового датчика Letsmakerobots
- Принцип работы ультразвукового датчика Microsonic














{kind=link}