
Ультразвуковые двигатели были изобретены в 1965 году В.В. Лавринко. В общем, мы осознаем тот факт, что движущая сила создается электромагнитным полем в обычных двигателях. Но, чтобы обеспечить движущую силу, эти двигатели используют пьезоэлектрический эффект в ультразвуковой частотный диапазон от 20 кГц до 10 МГц, который не слышен обычным людям. Следовательно, это называется пьезоэлектрической технологией USM. Ультразвуковые технологии используются USM, которые используют мощность ультразвуковых колебаний от компонента для своей работы.

Ультразвуковой мотор
Прежде чем подробно обсуждать эту технологию, нам необходимо знать информацию о ультразвуковые датчики , пьезоэлектрические датчики и пьезоэлектрические приводы.
Пьезоэлектрический датчик

Изменения физических величин, таких как деформация, сила, напряжение и ускорение, можно измерить, преобразовав их в электрическую энергию. Устройства или датчики, которые используются для этого процесса, называются пьезоэлектрическими датчиками. И этот процесс называется пьезоэлектрический эффект . Если напряжение приложено к кристаллу, то давление будет создаваться на атомах кристалла, вызывая деформацию атомов, которая составляет всего 0,1%.
Ультразвуковой датчик

Ультразвуковой датчик
Преобразователи, которые генерируют звуковые волны высокой частоты - от 20 кГц до 10 МГц - и определяют цель, считывая временной интервал между получением эхо-сигнала после отправки сигнала, называются ультразвуковыми датчиками. Следовательно, Ультразвуковые датчики могут использоваться для обнаружения препятствий и избежать столкновения.
Пьезоэлектрический привод

Для точной настройки линз камеры, зеркала, обрабатывающих инструментов и другого подобного оборудования требуется точное управление движением, это точное управление движением может быть достигнуто с помощью пьезоэлектрических приводов. Электрический сигнал может быть преобразован в точно контролируемое физическое смещение с помощью пьезоэлектрического привода. Они используются для управления гидравлическими клапанами и двигателями специального назначения.
Пьезоэлектрические ультразвуковые двигатели
Мы можем просто назвать ультразвуковую технологию инверсией пьезоэлектрического эффекта, потому что в этом случае электроэнергия превращается в движение. Следовательно, мы можем назвать это пьезоэлектрической технологией USM.
Пьезоэлектрический материал, называемый цирконатом, титанатом свинца и кварцем, очень часто используется для USM, а также для пьезоэлектрических приводов, хотя пьезоэлектрические приводы отличаются от USM. Такие материалы, как ниобат лития и некоторые другие монокристаллические материалы, также используются для USM и пьезоэлектрических технологий.
Основное различие между пьезоэлектрическими приводами и USM заключается в вибрации статора, контактирующей с ротором, которая может быть усилена за счет резонанса. Амплитуда движения привода составляет от 20 до 200 нм.
Типы ультразвуковых двигателей
USM классифицируются на разные типы на основе разных критериев, которые заключаются в следующем:
Классификация УСМ по типу вращения двигателя
- Двигатели роторного типа
- Двигатели линейного типа
Классификация УСМ по форме вибратора
- Тип стержня
- П-образный
- Цилиндрической формы
- Тип кольца (квадрат)
Классификация по типу вибрационной волны
- Тип стоячей волны - далее подразделяется на два типа:
- Однонаправленный
- Двунаправленный
- Тип распространяющейся волны или тип бегущей волны
Работа ультразвуковых двигателей

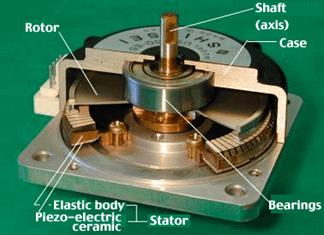
Ультразвуковой мотор работает
Вибрация передается в статор двигателя и используется для передачи движения ротору, а также для модуляции сил трения. Усиление и (микро) деформации активного материала используются для создания механического движения. Макро-движение ротора может быть достигнуто путем исправления микродвижения с помощью фрикционной границы между статор и ротор .
В ультразвуковой мотор состоит из статора и ротора. Работа УСМ изменяет ротор или линейный переводчик. Статор USM состоит из пьезокерамики для создания вибрации, металла статора для усиления генерируемой вибрации и фрикционного материала для контакта с ротором.
При приложении напряжения на поверхности металла статора генерируется бегущая волна, которая заставляет ротор вращаться. Поскольку ротор находится в контакте с металлом статора, как упоминалось выше, но только на каждом пике бегущей волны, что вызывает эллиптическое движение, и с этим эллиптическим движением ротор вращается в направлении, обратном направлению движения бегущая волна.
Особенности и достоинства ультразвуковых двигателей
- Они небольшие по размеру и отлично реагируют.
- Они имеют низкую скорость от десяти до нескольких сотен об / мин и высокий крутящий момент, поэтому редукторы не требуются.
- Они обладают высокой удерживающей способностью, и даже при отключении питания им не нужны тормоз и сцепление.
- Они маленькие, тонкие и имеют меньший вес по сравнению с другими электромагнитными двигателями.
- Эти двигатели не содержат электромагнитных материалов и не генерируют электромагнитные волны. Таким образом, они могут использоваться даже в областях с сильным магнитным полем, поскольку они не подвержены влиянию магнитного поля.
- У этих двигателей нет шестерен, и для их привода используется неслышимая частота вибрации. Таким образом, они не создают шума и работают очень тихо.
- Эти двигатели позволяют точно регулировать скорость и положение.
- Механическая постоянная времени для этих двигателей составляет менее 1 мс, а регулировка скорости для этих двигателей меньше шага.
- Эти двигатели имеют очень высокий КПД, и их КПД не зависит от их размера.
Недостатки ультразвуковых двигателей
- Требуется высокочастотный источник питания.
- Поскольку эти двигатели работают на трении, долговечность намного меньше.
- Эти двигатели имеют падающие характеристики крутящего момента.
Применение ультразвуковых двигателей
- Используется для автофокусировки объектива камеры.
- Используется в компактных устройствах для обработки бумаги и часах.
- Используется в конвейерных деталях машин.
- Используется для сушки и ультразвуковой очистки.
- Используется для впрыска масла в горелки.
- Используется как лучшие двигатели, которые, как известно, предлагают высокий потенциал для миниатюризации оборудования.
- Используется в медицине при сканировании с помощью магнитно-резонансной томографии.
- Используется для управления головками дисков компьютера, такими как дискеты, жесткие диски и приводы компакт-дисков.
- Используется во многих областях медицины, авиакосмической промышленности и робототехника .
- Используется для автоматического управления прокручивающимся экраном.
- В будущем эти двигатели могут найти применение в таких областях, как автомобилестроение, нанопозиционирование, микроэлектроника, Технология Micro Electro Mechanical System и товары народного потребления.
В этой статье вкратце рассматриваются пьезоэлектрические ультразвуковые двигатели, ультразвуковые датчики, пьезоэлектрические датчики, пьезоэлектрические приводы, работа USM, достоинства, недостатки и применения USM. Для получения дополнительной информации по вышеуказанным темам отправляйте свои запросы, оставляя комментарии ниже.
Фото:
- Ультразвуковой мотор от семинары
- Пьезоэлектрический датчик от imagesco
- Ультразвуковой датчик от iseerobot
- Пьезоэлектрический привод от платформа робота
- Работа ультразвуковых двигателей электрод










{kind=link}
{kind=link}
{kind=link}
{kind=link}