В статье объясняется простая схема транспортного средства с линейным повторителем, также известная как транспортное средство с линейным отслеживанием, с использованием всего лишь пары операционных усилителей и нескольких других компонентов без использования сложных Arduino или микроконтроллеров.
Что такое машина со слежением за линией
Транспортное средство слежения за линией - это разновидность автоматического управляемого транспортного средства (AGV), которое движется, обнаруживая белую линию, нарисованную или встроенную в землю. Сигнал от датчиков дает команду моторизованным колесам автоматически поворачиваться и настраиваться в соответствии с линией, создавая впечатление, что транспортное средство следует по линии. Отсюда и последователь линии имени.
В основном детекторы имеют вид фоторезисторы, такие как LDR или полупроводниковые детекторы света, такие как фотодиоды или фототранзисторы .
Пару таких световые детекторы используются, которые обнаруживают отраженный свет от белой линии и переключают транзисторную схему или компараторы на базе ОУ, которые, в свою очередь, управляют колесными двигателями транспортного средства для маневрирования в соответствии с поворотами и кривыми белой линии на земле.
Использование оконных компараторов
В предлагаемой цепи следящего за линией автомобиля мы использовали пару компараторы операционных усилителей задействовал моторы в балансировке.
Операционные усилители выполнены в виде окна участники . Как следует из названия, оконный компаратор сравнивает входной сигнал от детекторов с двумя крайними опорными напряжениями, которые составляют «оконные» пороги. Пока уровень входного сигнала находится в пределах эталонных пороговых значений этого «окна», выход обоих операционных усилителей поддерживает высокий логический уровень на своих выходах.
Однако в случае, если входной сигнал имеет тенденцию пересекать опорные пороговые значения, соответствующий выход операционного усилителя становится низким, что приводит к противоположным выходам операционных усилителей. Этот дисбаланс побуждает устройства вывода исправить ситуацию путем соответствующего переключения нагрузок.
Как работает схема
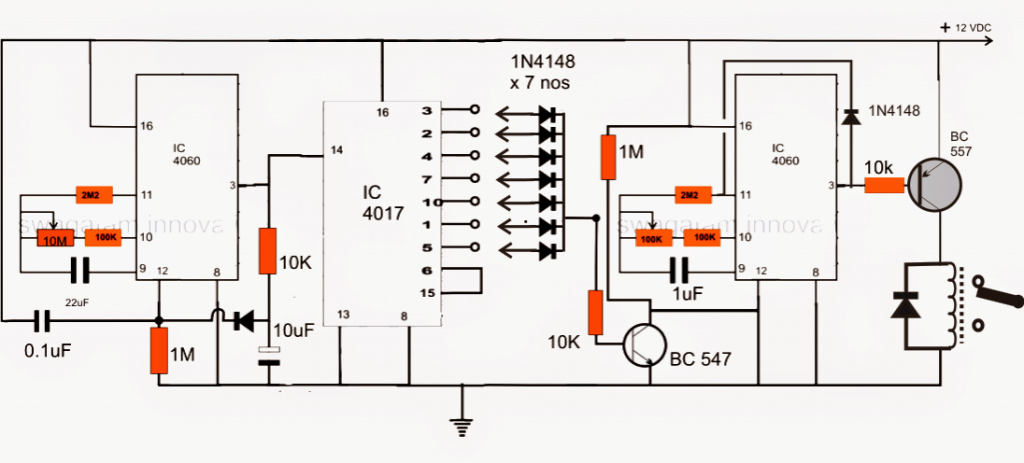
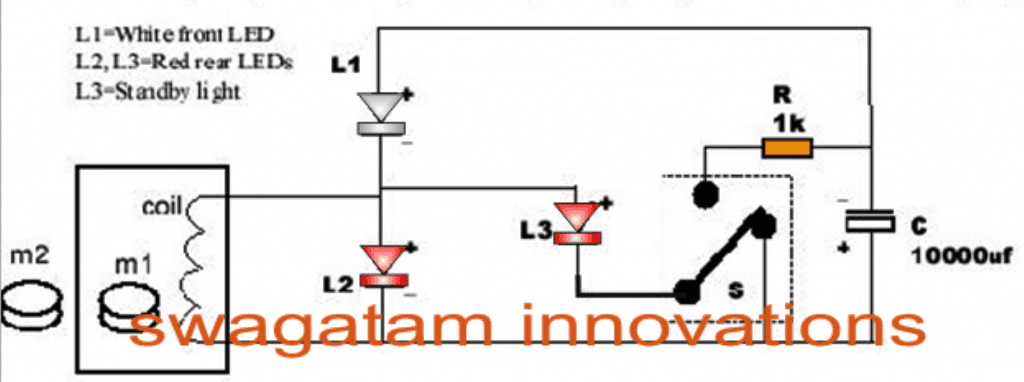
Ссылаясь на принципиальную схему автомобиля с линейным повторителем ниже, мы можем увидеть два операционных усилителя, сконфигурированных как оконные отсеки.

Операционные усилители могут быть от IC LM358 или LM324
Верхний операционный усилитель подключен для управления верхним пороговым пределом, а нижний операционный усилитель подключен для управления нижним пороговым пределом.
Инвертирующий вход операционного усилителя A1 и неинвертирующий вход операционного усилителя A2 фиксируются фиксированным опорным напряжением.
Неинвертирующий вход операционного усилителя A1 и инвертирующий вход операционного усилителя A2 связаны вместе и используются для измерения изменений входного сигнала от световых детекторов.
Два светозависимых резистора, LDR1 и LDR2, которые действуют как светочувствительные устройства, позиционируются как датчики света, так что они равномерно принимают отраженный свет от белой линии на них.
Пока свет на LDR достаточно высокий и однородный, вывод 3 A1 остается выше, чем его вывод 2, поскольку LDR1 соединен с положительной линией. Это приводит к тому, что его выход становится высоким.
Точно так же контакт 6 A2 удерживается ниже, чем его вывод 5 из-за соединения LDR2 с линией заземления, и это позволяет выходу A2 оставаться на высоком уровне.
Другими словами, когда LDR горят равномерно, неинвертирующие (+) входы обоих операционных усилителей удерживаются выше, чем их инвертирующие (-) входы, в результате чего их выходы становятся высокими.
При высоком уровне обоих выходов драйверы транзисторов обеспечивают равномерную работу соответствующих двигателей, что, соответственно, позволяет транспортному средству плавно двигаться по прямой.
Как машина движется по линии
Когда встречается изгибающаяся белая линия, один из LDR отклоняется от линии, вызывая разницу в освещении в точке A схемы. Это впоследствии вызывает низкий уровень на выходе соответствующего операционного усилителя и мгновенную остановку соответствующего двигателя.
В этой ситуации двигатель другой стороны, который все еще работает, вынуждает транспортное средство повернуть в сторону угла изгиба линии, что возвращает затененный LDR обратно в освещенную область белой линии. Когда это происходит, оба двигателя снова включаются, позволяя автомобилю работать нормально.
Вышеупомянутое автоматическое включение / выключение левого / правого двигателей в ответ на легкие отклонения от изгиба белых линий вынуждает транспортное средство продолжать регулировку и маневрировать в соответствии с белой линией.
Как построить автомобиль
В одном из моих предыдущих постов мы узнали, как простой автомобиль с дистанционным управлением можно было построить, используя всего пару двигателей, прикрепленных к заднему краю прямоугольной доски, и пару фиктивных колес на переднем крае доски.

Для предлагаемой схемы следящего за линией транспортного средства мы также используем аналогичную конструкцию транспортного средства, как показано на приведенном выше рисунке.
Компоновка выглядит довольно простой: к задним колесам прикреплены двигатели, которые управляются транзисторными драйверами через выходы операционных усилителей.
Когда автомобиль отклоняется от линии, разница в уровне освещенности на LDR выключает один из операционных усилителей, останавливая соответствующий двигатель.
Это заставляет работающий электродвигатель противоположной стороны повернуться в сторону остановленного электродвигателя, что означает, что если электродвигатель левой стороны будет заторможен, транспортное средство будет вынуждено повернуть влево, подстраиваясь под линию изгиба, в том же направлении.
Это также предполагает, что объединение левого / правого двигателя с выходами операционного усилителя должно быть выполнено надлежащим образом, чтобы направление изгиба линии и двигатель, который останавливается, находились на одной стороне транспортного средства.
Как разместить LDR
Поскольку два LDR (LDR1 и LDR2) должны равномерно воспринимать отраженный свет от белой линии, их ориентация должна быть перпендикулярна длине линии, как показано ниже.

Здесь мы предположили, что транспортное средство движется справа налево по проложенной линии по тому же пути.
Общая ширина LDR должна находиться в пределах ширины линии.
LDR и светодиод должны быть установлены на нижней поверхности транспортного средства, и желательно на задней стороне, прямо под задними колесами.
Указанный светодиод представляет собой белый светодиод с последовательным резистором 1K. Он должен быть расположен рядом с LDR и в центре, чтобы свет от LDR не достигал LDR напрямую, вместо этого свет должен достигать LDR путем отражения от белой линии под ними.
Характеристики двигателя
Двигатели могут быть любыми щеточными двигателями с постоянными магнитами, но они должны быть оборудованы коробкой передач, чтобы транспортное средство двигалось медленно и устойчиво.
Номинальная мощность двигателя должна соответствовать нагрузке, которую автомобиль должен нести. Это можно проверить с помощью некоторых практических экспериментов.
Как настроить
Чтобы настроить эту схему следящего за линией автомобиля, вам нужно будет расположить небольшую полосу белой линии, нарисованную на плоской поверхности, или наклеить белую ленту на плоскую поверхность.
Расположите систему (без колес) над линией, как показано на предыдущей диаграмме, так, чтобы LDR и светодиод правильно отрегулированы внутри ширины линии.
Включите питание, белый светодиод должен ярко освещать область под ним. Отрегулируйте две предустановки, пока оба двигателя не будут включены одновременно.
Теперь немного сместите блок вправо, чтобы LDR1 выходил за пределы белой линии.
Левый мотор должен остановиться. Если этого не происходит, регулируйте P1, пока левый мотор просто не остановится.
Затем слегка переместите устройство влево, чтобы LDR2 вышел за пределы белой линии. Это должно остановить правый мотор. Если этого не произошло, то отрегулируйте предустановку 10k, пока правый мотор не остановится.
На этом процедуры настройки будут завершены, и теперь вы можете установить колеса на двигатели и использовать управляемое транспортное средство для автоматического следования по проложенной дорожке на земле.
Белая линия против черной линии
Предлагаемая система следящего за линией автомобиля основана на белой линии, нанесенной на землю, вместо черной линии. Преимущество использования белой линии вместо черной:
Белая линия выглядит элегантнее и достойнее по сравнению с черной линией.
Линейный повторитель на основе белой линии может работать даже в полной темноте или при слабом освещении. Конструкции на основе черного света обычно требуют внешнего освещения для поддержания работоспособности автомобиля.
AGV на основе белой линии работает более точно независимо от цвета плитки, за исключением плиток, которые чрезвычайно белые или эквивалентны цвету белой линии.
Превращение машины в последователя черной линии
Несмотря на вышеупомянутые преимущества, если пользователь предпочитает, чтобы транспортное средство двигалось по черной линии, то система может быть легко преобразована для этого с помощью нескольких быстрых изменений в предлагаемой конструкции.
Пользователь может просто поменять местами входные контакты операционных усилителей с предустановками и удалить светодиод, связанный с LDR.
Предыдущая статья: Синусоидальная схема ИБП мощностью 50 Вт Далее: Объяснение основных электронных схем - Руководство по электронике для начинающих
![Соберите простую схему понижающего преобразователя [понижающий преобразователь]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)