В сообщении объясняется, как сделать дешевую, но мощную тележку с дистанционным управлением, которую пользователь может перемещать влево, вправо, вперед и назад по мере необходимости с помощью данного пульта дистанционного управления. Идея не опирается на схему микроконтроллера.
В одном из своих предыдущих постов я обсуждал простая схема игрушечного автомобиля с дистанционным управлением , настоящая идея тележки с дистанционным управлением вдохновлена той же концепцией, но предназначена для использования для перевозки огромных и гораздо более тяжелых грузов.
Тележка с дистанционным управлением для торговых точек
Эта конструкция может быть особенно подходящей и применимой для торговых центров или торговых точек розничной торговли, где она может быть реализована в виде небольшого транспортного средства для транспортировки материала внутри комплекса или помещения с помощью нескольких прессов удаленного блока Tx.
Первым шагом в создании предлагаемой тележки с дистанционным управлением было бы приобретение набора стандартных модулей Rx / Tx RF либо у местного дилера электроники, либо в любом интернет-магазине, я рекомендую покупать в интернет-магазине, так как это было бы намного проще и удобнее. , хотя и дороже.
Приобретенные единицы будут выглядеть, как показано ниже:
Использование модулей 433 МГц Tx, Rx

Левая сторона коричневого цвета - это передатчик или передатчик, а соседняя широкая цепь - это приемник или приемник.
Блок Tx можно увидеть с 4-мя красными кнопками, обозначенными как A, B, C, D, а на плате Rx можно увидеть 4 реле (черные прямоугольники).
Четыре соответствующие кнопки модуля Tx связаны по беспроводной связи для управления четырьмя соответствующими реле модуля Rx.
Вы можете видеть разъемы, закрепленные по краям платы (зеленого цвета), эти разъемы соответствующим образом оканчиваются входами питания (+) (-) для платы Rx, а также контактами реле для всех 4 реле.
Реле, как мы все знаем, состоит из 5 основных контактов и их выводов, а именно: 2 контакта для катушки, по одному для полюса и по одному для N / C и N / O.
Поскольку в блоке Rx есть 4 реле, вы сможете найти 5 x 4 = 20 выходов, связанных с соответствующими точками разъема.
Отследить эти выводы реле на разъемах может быть утомительной задачей, поэтому я рекомендую паять провода непосредственно на распиновку реле, чтобы избавить себя от вышеупомянутой задачи, эти усилия потребуются позже, когда мы будем подключать устройство к цепь управления тележкой.
Построение схемы управления реле для тележки
Для этого вам понадобится несколько реле и диодов. Реле должны быть правильно рассчитаны, чтобы работать с колесными двигателями большой мощности тележки. Я рекомендую использовать для этого реле сборки OEN, как показано на следующем рисунке:

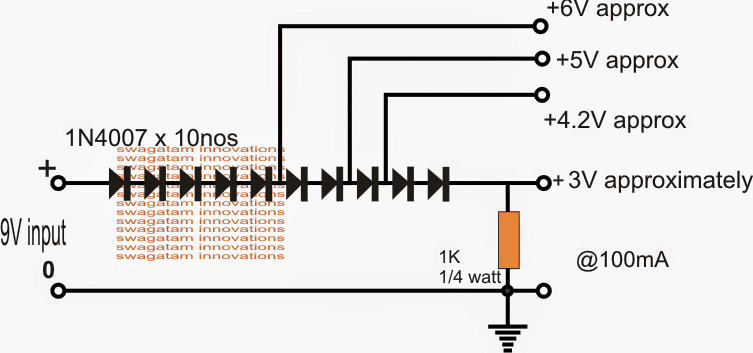
Диоды, которые потребуются в схеме драйвера реле, могут быть нашими стандартными диодами 1N4007.
Детали схемы для того же самого можно увидеть на следующей схеме:
Детали и схема подключения реле


Как работает схема удаленной тележки
Используя указанные выше реле и диоды, вам нужно будет закончить сборку указанной выше печатной платы драйвера реле, что может быть просто выполнено на куске веровальной платы.
После этого в нашем распоряжении появляется основная задача - объединить зеленые провода, показанные на диаграмме выше, с платой Rx дистанционного управления.
Перед интеграцией нам нужно будет вставить несколько модов в модуль Rx, как описано ниже:
Используя куски изолированных проводов, надлежащим образом зачищенных и луженых на концах, соедините (пайкой) все полюсные контакты реле и соедините этот общий разъем с положительной линией платы Rx.
Теперь в этой ситуации мы можем предположить, что, когда реле не находятся в активированном состоянии (через пульт дистанционного управления), положительный полюсный вход каждого реле будет связан с их соответствующими точками размыкания, а при активации положительный полюс будет сменить и связаться с соответствующими точками N / O.
Короче говоря, при активации замыкающий контакт получит положительное питание, и поэтому нас интересует это положительное питание от замыкающих контактов, потому что они будут инициироваться только при активации реле, что означает, что когда Tx (передатчик ) нажимаются кнопки.
Поэтому все соответствующие выводы Н / О должны быть соединены с зелеными проводами указанной выше схемы драйвера реле.
Как только это будет сделано, Rx будет интегрирован с модулем драйвера реле для выполнения всех намеченных маневров тележки с дистанционным управлением, а именно: вперед, назад, движения и левые, правые повороты.
Питание платы драйвера реле
Поскольку реле в каскаде релейного привода будут отвечать за перемещение тяжелых двигателей, связанных с колесом тележки, питание для этого должно быть равно сильным, поэтому свинцово-кислотные батареи глубокого цикла идеально подходят для этого применения.
Если предположить, что двигатели рассчитаны на 12 В, свинцово-кислотная батарея 40 Ач будет достаточно для того, чтобы тележка могла двигаться даже с более тяжелыми грузами.
Конфигурация колес с двигателями для предполагаемых маневров
Как можно увидеть на следующем рисунке, обсуждаемая тележка с дистанционным управлением потребует 4 колеса для поддержки и перемещения системы.
Однако только два передних колеса будут отвечать за выполнение предполагаемых маневров назад, вперед, вправо и влево, и поэтому двигатели должны быть зажаты этими двумя передними колесами тележки, как показано на следующем рисунке:

Настройка соединений колес тележки
Задние колеса - это просто фиктивные колеса, закрепленные только для обеспечения возможности свободного катания тележки в ответ на команды передних колес.
Как видно на изображении выше, модуль, помеченный как сборка печатной платы, представляет собой плату драйвера реле, удаленный модуль обозначает плату удаленного приемника Rx, а аккумулятор - это аккумулятор 12 В на 40 Ач, который мы обсуждали в предыдущем разделе статьи.
После сборки вам, возможно, придется настроить и проверить соединения проводов двигателя с платой драйвера реле.
Для прямого и обратного движения оба двигателя должны быть синхронизированы друг с другом, с другой стороны, для выполнения правого или левого поворота двигатели должны совершать противоположное вращательное движение.
Если вы обнаружите, что двигатель не ведет себя указанным выше образом, это, скорее всего, можно исправить, просто поменяв полярность одного из двигателей. Это немедленно исправит ситуацию и заставит двигатели выполнять указанные маневры.
Наконец, кнопки A. B, C, D могут быть соответствующим образом согласованы или заменены для любого из соответствующих маневров путем настройки зеленых проводных соединений с модулем Rx в соответствии с личными предпочтениями пользователя.
Предыдущая статья: Как изменить SMPS для регулируемого выхода тока и напряжения Далее: СВЧ-датчик или цепь доплеровского датчика