
Как следует из названия, эта статья даст точное представление о структуре и работе ПИД-регулятора. Однако, вдаваясь в подробности, давайте познакомимся с ПИД-регуляторами. ПИД-регуляторы находят широкое применение в управлении производственными процессами. Примерно 95% операций с обратной связью Индустриальная автоматизация сектор используют ПИД-регуляторы. PID означает пропорционально-интегрально-производная. Эти три контроллера объединены таким образом, что вырабатывается управляющий сигнал. В качестве контроллера обратной связи он обеспечивает управляющий выход на желаемых уровнях. До изобретения микропроцессоров ПИД-регулирование осуществлялось с помощью аналоговых электронных компонентов. Но сегодня все ПИД-регуляторы обрабатываются микропроцессорами. Программируемые логические контроллеры также есть инструкции встроенного ПИД-регулятора. Из-за гибкости и надежности ПИД-регуляторов они традиционно используются в приложениях управления технологическими процессами.
Что такое ПИД-регулятор?
Термин PID означает пропорциональную интегральную производную, и это один из видов устройств, используемых для управления различными параметрами процесса, такими как давление, расход, температура и скорость в промышленных приложениях. В этом контроллере устройство обратной связи контура управления используется для регулирования всех переменных процесса.
Этот тип управления используется для управления системой в направлении целевого местоположения, в противном случае на уровне. Он почти везде используется для контроля температуры и используется в научных процессах, автоматизации и бесчисленном количестве химических веществ. В этом контроллере обратная связь с обратной связью используется для поддержания реального выхода метода, близкого к цели, в противном случае - в фиксированной точке, если это возможно. В этой статье обсуждается конструкция ПИД-регулятора с используемыми в них режимами управления, такими как P, I и D.
История
История ПИД-регулятора такова: в 1911 году Элмер Сперри разработал первый ПИД-регулятор. После этого в TIC (Taylor Instrumental Company) был внедрен бывший пневматический контроллер с полной настройкой в 1933 году. Спустя несколько лет инженеры по управлению устранили ошибку установившегося состояния, которая обнаруживается в пропорциональных контроллерах, путем перенастройки конца на какое-то ложное значение, пока ошибка не стала равной нулю.
Эта перенастройка включала ошибку, известную как пропорционально-интегральный регулятор. После этого, в 1940 году, был разработан первый пневматический ПИД-регулятор посредством производного действия для уменьшения проблем с перерегулированием.
В 1942 году Ziegler & Nichols ввели правила настройки, чтобы инженеры обнаруживали и устанавливали подходящие параметры ПИД-регуляторов. Наконец, в середине 1950-х годов автоматические ПИД-регуляторы получили широкое распространение в промышленности.
Блок-схема ПИД-регулятора
Система с обратной связью, такая как ПИД-регулятор, включает в себя систему управления с обратной связью. Эта система оценивает переменную обратной связи, используя фиксированную точку, чтобы генерировать сигнал ошибки. Исходя из этого, он изменяет вывод системы. Эта процедура будет продолжаться до тех пор, пока ошибка не достигнет нуля, в противном случае значение переменной обратной связи станет эквивалентным фиксированной точке.
Этот контроллер дает хорошие результаты по сравнению с контроллером типа ВКЛ / ВЫКЛ. В контроллере типа ВКЛ / ВЫКЛ для управления системой доступны всего два условия. Как только значение процесса ниже фиксированной точки, оно включается. Точно так же он выключится, когда значение будет выше фиксированного значения. Выходной сигнал нестабилен в контроллерах такого типа и часто будет колебаться в районе фиксированной точки. Однако этот контроллер более устойчив и точен по сравнению с контроллером типа ВКЛ / ВЫКЛ.

Работа ПИД-регулятора
Работа ПИД-регулятора
При использовании недорогого простого контроллера ВКЛ-ВЫКЛ возможны только два состояния управления, например, полностью ВКЛ или полностью ВЫКЛ. Он используется для приложения с ограниченным управлением, где этих двух состояний управления достаточно для цели управления. Однако колебательный характер этого управления ограничивает его использование, и поэтому он заменяется ПИД-регуляторами.
ПИД-регулятор поддерживает выходной сигнал таким образом, чтобы не было ошибки между переменной процесса и заданным значением / желаемым выходом при выполнении операций с обратной связью. PID использует три основных режима управления, которые описаны ниже.
P- Контроллер
Пропорциональный или П-регулятор дает выходной сигнал, пропорциональный текущей ошибке e (t). Он сравнивает желаемое или заданное значение с фактическим значением или значением процесса обратной связи. Результирующая ошибка умножается на пропорциональную константу, чтобы получить результат. Если значение ошибки равно нулю, то этот выход контроллера равен нулю.

П-контроллер
Этот контроллер требует смещения или ручного сброса при использовании отдельно. Это потому, что он никогда не достигает установившегося состояния. Он обеспечивает стабильную работу, но всегда поддерживает установившуюся ошибку. Скорость отклика увеличивается при увеличении пропорциональной постоянной Kc.

Ответ P-контроллера
I-контроллер
Из-за ограничения p-контроллера, где всегда существует смещение между переменной процесса и уставкой, необходим I-контроллер, который обеспечивает необходимые действия для устранения установившейся ошибки. Он интегрирует ошибку за период времени, пока значение ошибки не достигнет нуля. Он содержит значение для конечного устройства управления, при котором ошибка становится равной нулю.

ПИ-регулятор
При отрицательной ошибке интегральное управление снижает выходную мощность. Это ограничивает скорость ответа и влияет на стабильность системы. Скорость отклика увеличивается за счет уменьшения интегрального усиления Ki.

Ответ контроллера PI
На приведенном выше рисунке, когда коэффициент усиления I-контроллера уменьшается, установившаяся ошибка также продолжает уменьшаться. В большинстве случаев используется ПИ-регулятор, особенно там, где не требуется высокая скорость реакции.
При использовании ПИ-регулятора выход I-регулятора ограничен некоторым диапазоном, чтобы преодолеть интегральная закрутка условия, при которых интегральный выход продолжает увеличиваться даже при нулевом состоянии ошибки из-за нелинейностей в объекте.
D-контроллер
I-контроллер не может предсказать будущее поведение ошибки. Таким образом, он нормально реагирует на изменение уставки. D-контроллер преодолевает эту проблему, предвидя будущее поведение ошибки. Его выход зависит от скорости изменения ошибки во времени, умноженной на производную константу. Это дает толчок для выхода, тем самым увеличивая отклик системы.

ПИД-регулятор
На приведенном выше рисунке ответ D показывает, что контроллер больше по сравнению с ПИ-регулятором, а также время установления выхода уменьшено. Это улучшает стабильность системы за счет компенсации задержки фазы, вызванной I-контроллером. Увеличение производного усиления увеличивает скорость отклика.

Ответ ПИД-регулятора
Итак, наконец, мы заметили, что, комбинируя эти три контроллера, мы можем получить желаемый отклик для системы. Разные производители разрабатывают разные алгоритмы ПИД-регулирования.
Типы ПИД-регуляторов
ПИД-регуляторы подразделяются на три типа: двухпозиционные, пропорциональные и стандартные. Эти контроллеры используются на основе системы управления, пользователь может использовать контроллер для регулирования метода.
ВКЛ / ВЫКЛ Управление
Двухпозиционный метод управления - это самый простой тип устройства, используемого для регулирования температуры. Выход устройства может быть включен / выключен без центрального состояния. Этот контроллер включит выход сразу после того, как температура пересечет фиксированную точку. Контроллер предельного значения - это один из видов контроллеров ВКЛ / ВЫКЛ, в которых используется блокирующее реле. Это реле сбрасывается вручную и используется для отключения метода после достижения определенной температуры.
Пропорциональный контроль
Этот тип контроллера предназначен для устранения цикличности, связанной с управлением ВКЛ / ВЫКЛ. Этот ПИД-регулятор снижает нормальную мощность, подаваемую на нагреватель, когда температура достигает фиксированной точки.
Этот контроллер имеет одну функцию для управления нагревателем, чтобы он не превышал фиксированную точку, но достигал фиксированной точки для поддержания постоянной температуры.
Это пропорциональное действие может быть достигнуто путем включения и выключения выхода на короткие периоды времени. На этот раз при дозировании изменится соотношение времени включения и выключения для регулирования температуры.
ПИД-регулятор стандартного типа
Этот тип ПИД-регулятора объединяет пропорциональное управление посредством интегрального и производного управления, чтобы автоматически помогать устройству компенсировать изменения в системе. Эти модификации, интеграл и производная выражаются в единицах измерения, основанных на времени.
Эти контроллеры также обозначаются как обратные, RATE и RESET соответственно. Условия PID должны быть отрегулированы отдельно, в противном случае они должны быть настроены для конкретной системы методом проб и ошибок. Эти контроллеры обеспечивают наиболее точное и стабильное управление 3 типами контроллеров.
ПИД-регуляторы реального времени
В настоящее время на рынке доступны различные типы ПИД-регуляторов. Эти контроллеры используются для промышленных требований управления, таких как давление, температура, уровень и расход. После того, как эти параметры управляются с помощью ПИД, можно выбрать использование отдельного ПИД-регулятора или любого ПЛК.
Эти отдельные контроллеры используются везде, где требуется проверка одного или двух контуров, а также управления иным способом в условиях, когда это сложно справа от входа в более крупные системы.
Эти устройства управления предоставляют различные варианты для одиночного и двойного управления. ПИД-контроллеры автономного типа обеспечивают несколько конфигураций с фиксированной точкой для создания нескольких автономных сигналов тревоги.
Эти автономные контроллеры в основном включают ПИД-контроллеры от Honeywell, контроллеры температуры от Yokogawa, контроллеры автонастройки от OMEGA, Siemens и контроллеры ABB.
ПЛК, как и ПИД-контроллеры, используются в большинстве приложений промышленного управления. Расположение блоков ПИД может быть выполнено внутри PAC или PLC, чтобы предоставить лучший выбор для точного управления PLC. Эти контроллеры умнее и мощнее по сравнению с отдельными контроллерами. Каждый ПЛК включает блок ПИД в программном обеспечении.
Методы настройки
Перед началом работы ПИД-регулятора его необходимо настроить в соответствии с динамикой контролируемого процесса. Разработчики предоставляют значения по умолчанию для членов P, I и D, и эти значения не могут дать желаемой производительности и иногда приводят к нестабильности и снижению производительности управления. Для настройки ПИД-регуляторов разработаны различные типы методов настройки, которые требуют от оператора большого внимания для выбора наилучших значений пропорционального, интегрального и производного усиления. Некоторые из них приведены ниже.
ПИД-регуляторы используются в большинстве промышленных приложений, но нужно знать настройки этого регулятора, чтобы правильно настроить его и генерировать предпочтительный выходной сигнал. Здесь настройка - это не что иное, как процедура получения идеального ответа от контроллера путем установки наилучшего пропорционального усиления, интегральных и производных коэффициентов.
Желаемый выходной сигнал ПИД-регулятора может быть получен путем настройки регулятора. Существуют различные методы получения требуемого выходного сигнала от контроллера, такие как метод проб и ошибок, метод Цейглера-Николса и кривая реакции процесса. Наиболее часто используемые методы - это метод проб и ошибок, метод Цейглера-Николса и др.
Метод проб и ошибок: Это простой метод настройки ПИД-регулятора. Пока система или контроллер работают, мы можем настроить контроллер. В этом методе, во-первых, мы должны установить значения Ki и Kd равными нулю и увеличивать пропорциональный член (Kp), пока система не достигнет колебательного поведения. Как только он начнет колебаться, отрегулируйте Ki (интегральный член), чтобы колебания прекратились, и, наконец, отрегулируйте D, чтобы получить быстрый отклик.
Метод кривой реакции процесса: Это метод настройки без обратной связи. Он дает ответ, когда к системе применяется пошаговый ввод. Первоначально мы должны применить некоторые управляющие выходные данные к системе вручную и записать кривую отклика.
После этого нам нужно рассчитать наклон, мертвое время, время нарастания кривой и, наконец, подставить эти значения в уравнения P, I и D, чтобы получить значения усиления членов ПИД.

Кривая реакции процесса
Метод Цейглера-Николса: Цейглер-Николс предложил методы с обратной связью для настройки ПИД-регулятора. Это метод непрерывного цикла и метод затухающих колебаний. Процедуры для обоих методов одинаковы, но поведение колебаний отличается. При этом, во-первых, мы должны установить константу p-регулятора Kp на конкретное значение, в то время как значения Ki и Kd равны нулю. Пропорциональное усиление увеличивается до тех пор, пока система не будет колебаться с постоянной амплитудой.
Коэффициент усиления, при котором система производит постоянные колебания, называется предельным усилением (Ku), а период колебаний называется предельным периодом (Pc). Как только он будет достигнут, мы можем ввести значения P, I и D в ПИД-регулятор по таблице Зиглера-Николса в зависимости от используемого регулятора, например, P, PI или PID, как показано ниже.

Таблица Цейглера-Николса
Структура ПИД-регулятора
ПИД-регулятор состоит из трех частей: пропорционального, интегрального и производного управления. Совместная работа этих трех контроллеров дает стратегию управления процессом. ПИД-регулятор управляет переменными процесса, такими как давление, скорость, температура, расход и т. Д. В некоторых приложениях используются ПИД-регуляторы в каскадных сетях, где два или более ПИД-регулятора используются для управления.

Структура ПИД-регулятора
На рисунке выше показана структура ПИД-регулятора. Он состоит из блока PID, который передает свой вывод блоку процесса. Процесс / завод состоит из устройств конечного управления, таких как приводы, регулирующие клапаны и другие устройства управления, для управления различными процессами на производстве / заводе.
Сигнал обратной связи от технологической установки сравнивается с заданным значением или опорным сигналом u (t), и соответствующий сигнал ошибки e (t) подается в алгоритм ПИД. В соответствии с вычислениями пропорционального, интегрального и производного управления в алгоритме, контроллер вырабатывает комбинированный ответ или управляемый выходной сигнал, который применяется к устройствам управления установкой.
Всем приложениям управления не нужны все три элемента управления. Комбинации, такие как элементы управления PI и PD, очень часто используются на практике.
Приложения
Приложения ПИД-регулятора включают следующее.
Лучшее применение ПИД-регулятора - регулирование температуры, при котором регулятор использует вход датчика температуры, а его выход может быть связан с элементом управления, таким как вентилятор или нагреватель. Как правило, этот контроллер представляет собой просто один элемент в системе контроля температуры. Вся система должна быть исследована, а также рассмотрена при выборе правильного контроллера.
Контроль температуры печи
Как правило, печи используются для обогрева, а также для хранения огромного количества сырья при очень высоких температурах. Обычно занимаемый материал имеет огромную массу. Следовательно, требуется большое количество инерции, и температура материала не меняется быстро, даже когда применяется большое количество тепла. Эта функция приводит к умеренно стабильному сигналу PV и позволяет производному периоду эффективно корректировать неисправность без резких изменений FCE или CO.
Контроллер заряда MPPT
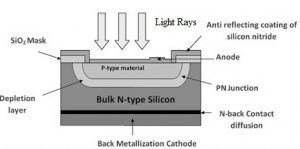
Вольт-амперная характеристика фотоэлектрического элемента в основном зависит от диапазона температуры, а также от освещенности. В зависимости от погодных условий ток и рабочее напряжение будут постоянно меняться. Таким образом, чрезвычайно важно отслеживать самые высокие показатели PowerPoint эффективной фотоэлектрической системы. ПИД-регулятор используется для определения точки MPPT, давая ПИД-регулятору фиксированные значения напряжения и тока. После изменения погодных условий трекер поддерживает стабильные ток и напряжение.
Конвертер силовой электроники
Мы знаем, что преобразователь - это приложение силовой электроники, поэтому ПИД-регулятор в основном используется в преобразователях. Когда преобразователь подключается к системе на основе изменения нагрузки, выходной сигнал преобразователя будет изменен. Например, инвертор связан с нагрузкой, и при увеличении нагрузки подается большой ток. Таким образом, параметр напряжения, а также сила тока нестабильны, но могут изменяться в зависимости от требований.
В этом состоянии этот контроллер будет генерировать ШИМ-сигналы для активации IGBT инвертора. В зависимости от изменения нагрузки на ПИД-регулятор подается ответный сигнал, поэтому он выдаст ошибку n. Эти сигналы генерируются на основе сигнала неисправности. В этом состоянии мы можем получить переменный ввод и вывод через аналогичный инвертор.
Применение ПИД-регулятора: Замкнутый контур управления для бесщеточного двигателя постоянного тока
Интерфейс ПИД-регулятора
Дизайн и интерфейс ПИД-регулятора могут быть выполнены с помощью микроконтроллера Arduino. В лаборатории ПИД-контроллер на базе Arduino разработан с использованием платы Arduino UNO, электронных компонентов, термоэлектрического охладителя, тогда как языки программирования, используемые в этой системе, - C или C ++. Эта система используется для контроля температуры в лаборатории.
Параметры ПИД для конкретного регулятора находятся физически. Функционирование различных параметров ПИД-регулятора может быть реализовано за счет последующего противопоставления различных форм контроллеров.
Эта система сопряжения может эффективно рассчитывать температуру с погрешностью ± 0,6 ℃, в то время как постоянная температура регулируется путем простого небольшого отклонения от предпочтительного значения. Концепции, используемые в этой системе, обеспечат недорогие, а также точные методы управления физическими параметрами в предпочтительном диапазоне в лаборатории.
Таким образом, в этой статье обсуждается обзор ПИД-регулятора, который включает историю, блок-схему, структуру, типы, работу, методы настройки, взаимодействие, преимущества и приложения. Мы надеемся, что смогли предоставить базовые, но точные знания о ПИД-регуляторах. Вот простой вопрос для всех вас. Среди различных методов настройки, какой метод лучше всего использовать для достижения оптимальной работы ПИД-регулятора и почему?
Просим вас дать свои ответы в разделе комментариев ниже.
Фото Кредиты
Блок-схема ПИД-регулятора Викимедиа
Структура ПИД-регулятора, П-регулятор, П-регулятор и ПИД-регулятор blog.opticontrols
P - ответ контроллера controls.engin.umich
Ответ ПИ-регулятора мясо
Ответ ПИД-регулятора Викимедиа
Таблица Цейглера-Николса controls.engin




{kind=link}
{kind=link}
{kind=link}
{kind=link}