В этой части статьи мы узнаем об инновационном методе преобразования механизма нажатия педали в электромобилях в соответственно изменяющийся электрический сигнал, который в дальнейшем может быть использован для обработки управления скоростью транспортного средства.
Объясненная концепция будет работать как электронный ускоритель, который будет линейно увеличивать скорость автомобиля при постепенном нажатии на педаль, и наоборот, используя технологию PWM.
Идея была предложена г-ном Локешем Майни.
Технические характеристики
Я механик, в настоящее время работаю над электромобилем, и я хочу контролировать скорость своего мотора с помощью педали. у меня нет контроллера для моего мотора, пожалуйста, помогите мне собрать свой, я буду очень
благодарен
Технические характеристики двигателя: 36 вольт, 43 ампер и щеточный двигатель постоянного тока мощностью 1,5 л.с.
Механический дизайн
Электронная версия педали акселератора в первую очередь потребует механизма, который сначала преобразует механическое нажатие на педаль в соответствующий изменяющийся электрический сигнал, чтобы этот сигнал можно было обрабатывать через каскад процессора сигналов для желаемого преобразования в практическое управление скоростью педали. средство передвижения.
Можно опробовать многие концепции, например, с помощью пьезоэлектрического датчика нагрузки, емкостного датчика нагрузки, резонансного датчика и т. Д. В этой статье мы изучим гораздо более простой метод, разработанный мной, который включает сборку светодиодов / LDR для достижения того же. .

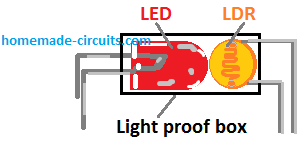
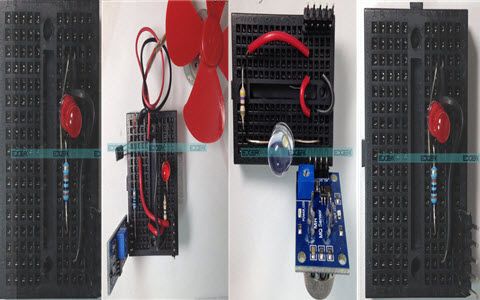
В электромеханическом устройстве, показанном на рисунке выше, мы видим следующие интегрированные компоненты:
Маленькая шестеренка, прикрепленная с помощью винтового механизма.
Головка винта с белой матовой отражающей поверхностью
Узел LED / LDR, расположенный перед головкой винта.
Как работает Предлагаемый механизм.
Шестерня, показанная на рисунке выше, должна быть заблокирована другой передачей, передаточное число которой может быть в 10 раз выше, чем у этой передачи.
Большую шестерню необходимо настроить с педальным механизмом таким образом, чтобы он инициировал вращательное движение в ответ на нажатие педали.
Вращательная реакция шестерен, в свою очередь, приведет к поступательному движению головки винта через камеру, в которой расположен узел LED / LDR.
Процесс приведет к тому, что LDR будет принимать пропорционально изменяющееся количество отраженного света от светодиода.
Эти изменяющиеся данные (в форме переменного сопротивления), соответствующие нажатию педали, затем могут быть поданы в схему процессора сигналов для обеспечения намеченного управления скоростью конкретного транспортного средства.
в следующая запись мы изучим этап сигнального процессора, используя технику ШИМ.
в над разделом мы узнали о простой сборке электромеханического преобразователя для преобразования действия педали в пропорционально изменяющийся электрический сигнал.
Преобразование действия педали в ШИМ
Теперь давайте изучим реализацию схемы, которая позволит нам преобразовать электрический сигнал педали в соответственно изменяющийся сигнал ШИМ для предполагаемого управления скоростью двигателя транспортного средства.

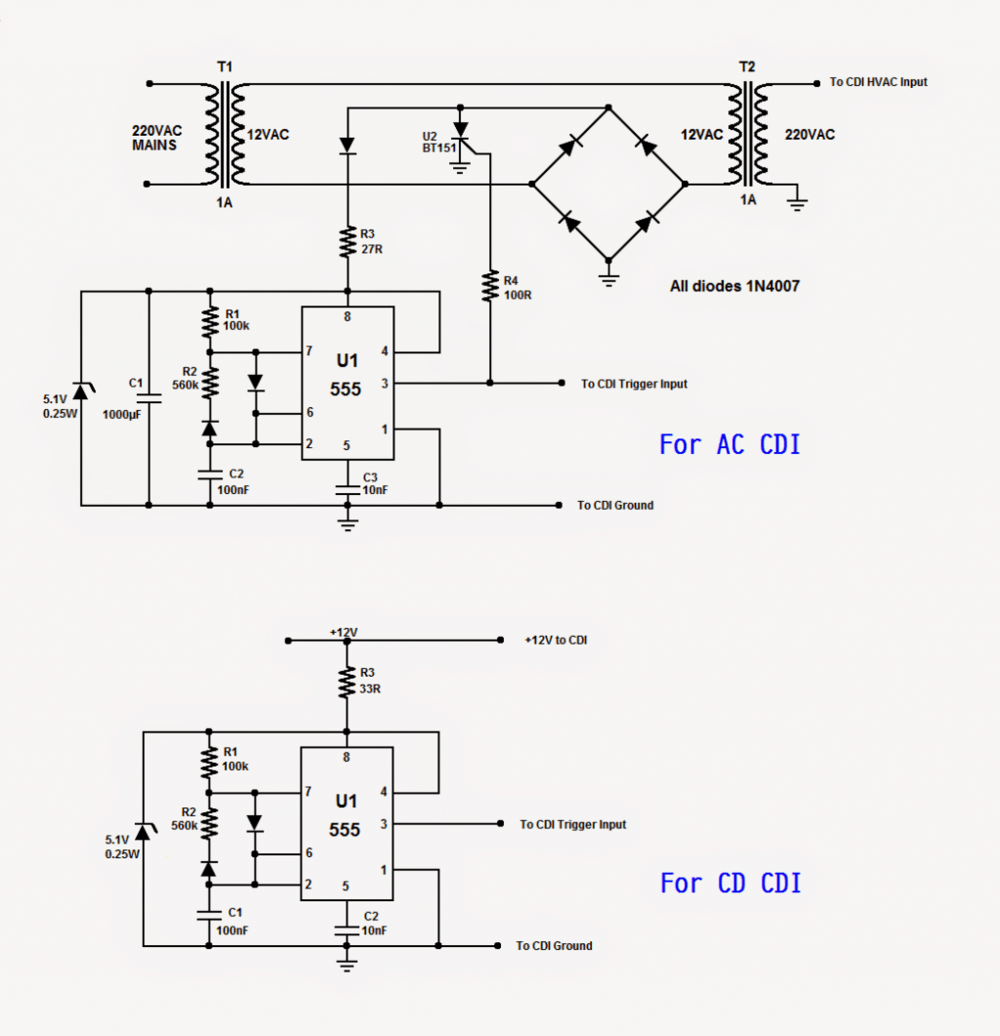
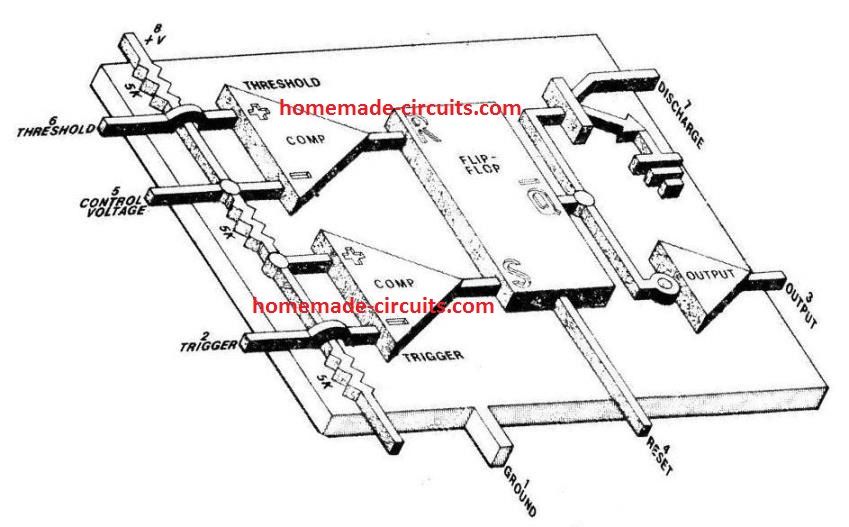
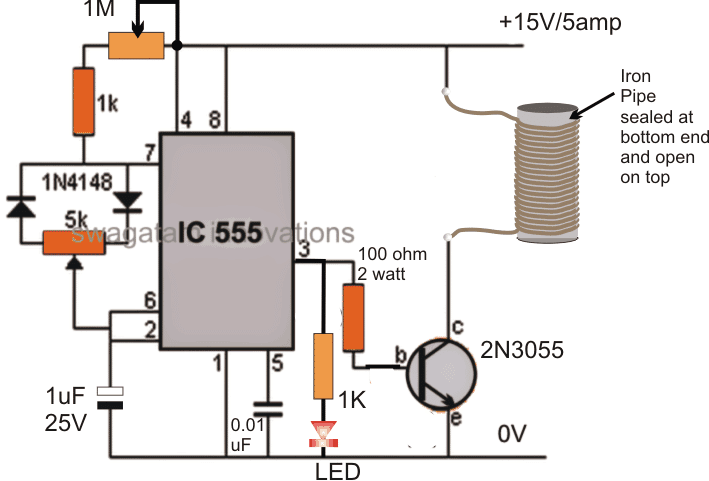
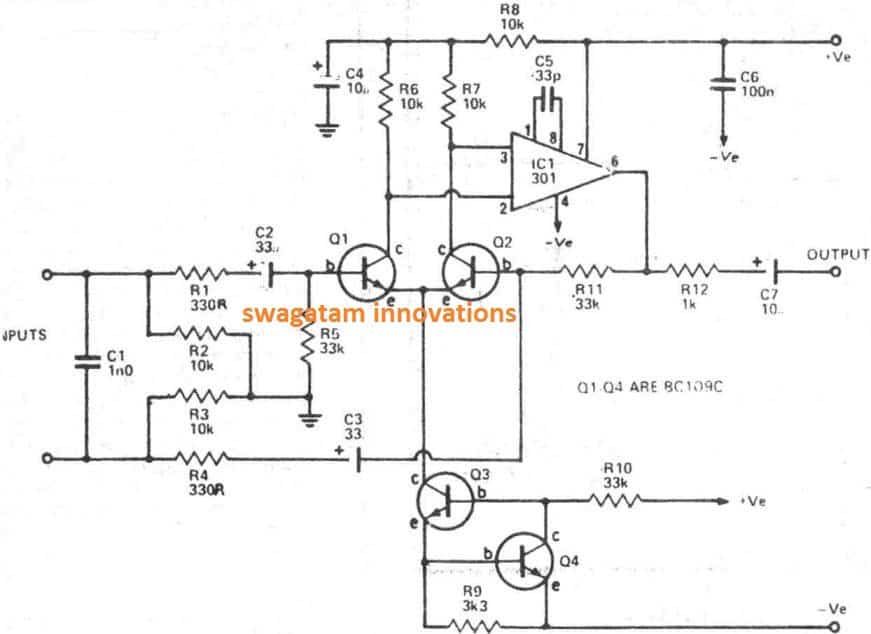
Обращаясь к приведенной выше принципиальной схеме, мы можем оценить работу схемы с помощью следующих пунктов:
IC1 сконфигурирован как генератор импульсов 80 Гц, имеющий максимальное время включения и минимальное время выключения в качестве рабочего цикла.
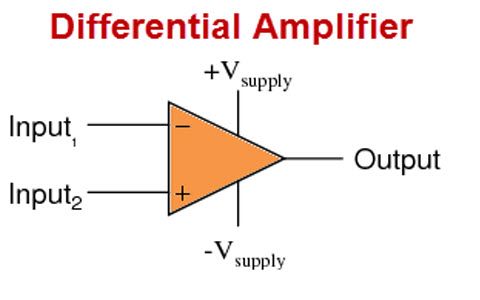
IC2 устроен как компаратор, который сначала преобразует упомянутый выше импульс 80 Гц, приложенный к его выводу 2, с треугольными волнами, генерируемыми на его выводе 6, и сравнивает треугольные волны с модулирующим напряжением, доступным на его выводе 5.
Модулирующее напряжение на выводе 5 поступает от эмиттера BJT BC547, который сконфигурирован как общий коллектор, база которого соединена с входами LDR, получаемыми при нажатии на педаль.
Изменяющееся сопротивление в ответ на нажатие педали сравнивается с предустановленной настройкой 100 кОм, и на базе транзистора создается пропорциональная величина напряжения, которая преобразует входной слабый ток в эквивалентный сильноточный сигнал на выводе 5 микросхемы IC2.
Этот мгновенный уровень потенциала принимается и обрабатывается IC2, генерируя пропорциональные по величине сигналы ШИМ для МОП-транзистора и подключенного двигателя.
Таким образом, скорость двигателя контролируется и изменяется в соответствии с колеблющимися ШИМ в ответ на нажатия педалей транспортного средства.
Вышеупомянутые процедуры эффективно преобразуют действия педалей в управляемые действия двигателя транспортного средства и его скорости.
Как настроить схему.
Это очень просто.
- Нажмите педаль до максимума, чтобы головка винта достигла ближайшего возможного положения перед сборкой светодиодов / LDR.
- Затем отрегулируйте предустановку 100 кОм, пока контакт 3 IC2 не начнет генерировать ШИМ с максимальной шириной, это может быть подтверждено измерением напряжения на контакте 3, чтобы оно было как можно ближе к напряжению питания схемы, то есть 5 В.
- Как только это будет сделано, можно считать, что процедура настройки завершена.
- Теперь результаты можно проверить, нажимая педаль на разных уровнях и проверяя изменение скорости двигателя одинаковым образом.
Предыдущая статья: Простая схема измерителя СОЭ Далее: Как построить схему освещения для выращивания растений