
К робот - это электромеханическая машина Это управляется схемой или компьютерной программой. Роботы обмениваются людьми, помогая выполнять непрерывные и опасные задачи, которые люди предпочитают не делать. Подарок роботы делятся на разные категории в зависимости от их характеристик и производительности, таких как промышленные роботы, коммерческие роботы, сервисные роботы, мобильные роботы. Вот сервисный робот, который выполняет непрерывные задачи, приветствуя людей движением руки, представляющим «Намасте» посредством записанного голосового сообщения. Обычно, когда мы приглашаем людей домой, на вечеринки, свадебные торжества, в офис и т. Д., Нам нужно организовать человека, чтобы он поприветствовал и пригласил их у входа. Если людей мало, то задача проще. Но если вы здороваетесь с сотнями людей, то задача непростая. Чтобы преодолеть эту проблему, вот проект, а именно робот намасте с голосовым управлением.

Намасте Робот
Робот Намасте с голосовым управлением
Основная концепция этого Намасте Проект робота для управления различными серводвигателями через плату Arduino. Этот робот сканирует окружающих людей и поворачивает голову на 180 °. Если он узнает кого-то поблизости, он желает, чтобы тот человек с Намасте сжал обе руки вместе. Это традиционный способ пожелать людей в Индии. В приложения роботов вовлекать в торговые центры, парки, офисы для привлечения людей.
Блок-схема робота Намастэ с голосовым управлением
На следующем рисунке изображена блок-схема робота Namaste с голосовым управлением. В таком роботе запрограммированы голосовые команды. Всю отладочную плату можно подключить к общему источнику питания. Описание каждого блока следующее. В источник питания обеспечивает питание всех модулей. Для этих модулей требуется ток в мА, а рабочее напряжение будет 5 В.

Блок-схема робота Намастэ с голосовым управлением
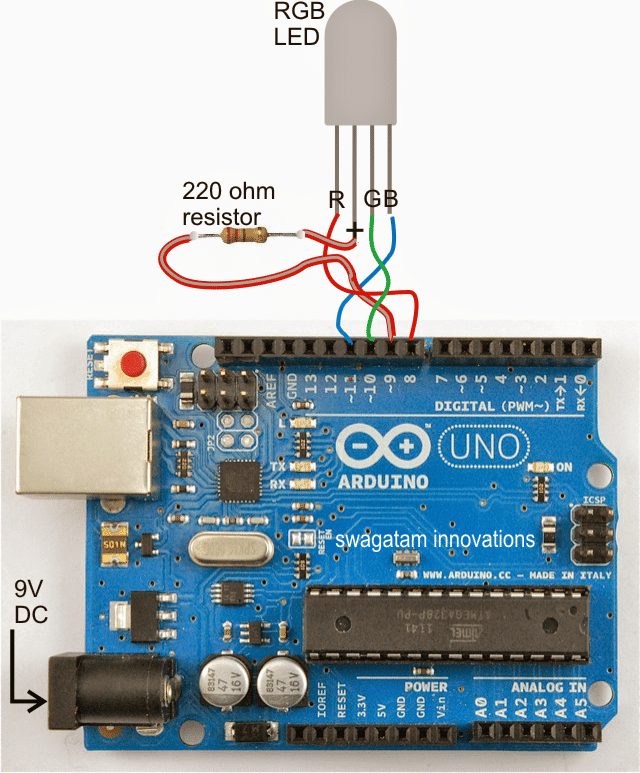
Плата Arduino
Arduino - это один из видов инструментов основан на простой плате микроконтроллера, используемой для управления и ощущения физического мира, чем настольный компьютер. Для физических вычислений доступны различные платформы микроконтроллеров. Важными особенностями Arduino являются недорогое программное обеспечение с открытым исходным кодом и расширяемое программное обеспечение. Программное обеспечение Arduino доступно как инструмент с открытым исходным кодом, а язык может быть расширен с помощью библиотек C ++.

Плата Arduino
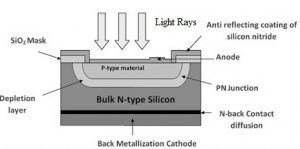
Датчик пинга
Датчик ping использует SONAR для контроля расстояния до объекта поблизости. Этот датчик используется как глаза робота, чтобы почувствовать препятствие, например датчик приближения. Это дает отличную точность диапазона и стабильные показания. На работу этого датчика не влияет черный материал или солнечный свет. Характеристики датчика ping: напряжение 5 В, ток 15 мА, угол наклона датчика НЕ> = 15 и расстояние обнаружения 2 см ~ 450 см.

Датчик пинга
Взаимодействие датчика ping с Arduino показано ниже. Доступны четыре контакта для подключения датчика пинга к плате Arduino. Четыре контакта на плате Arduino - это GND, VCC, ECHO и TRIGGER. Контакты на плате - это D0-D13, при этом 12 и 13 контактов являются входными и выходными контактами.
Микроконтроллер Arduino предлагает нам библиотеку сервоуправления, которая позволяет нам легко переключать сервоприводы. В этом проекте мы использовали 5 сервоприводов для регулирования движений робота Намасте, таких как голова, правый локоть, левый локоть, правое плечо и левое плечо. Здесь контакты цифровых входов / выходов (D5, D6, D9, D10, D1) означают на плате Arduino, подключенной к серводвигателям.
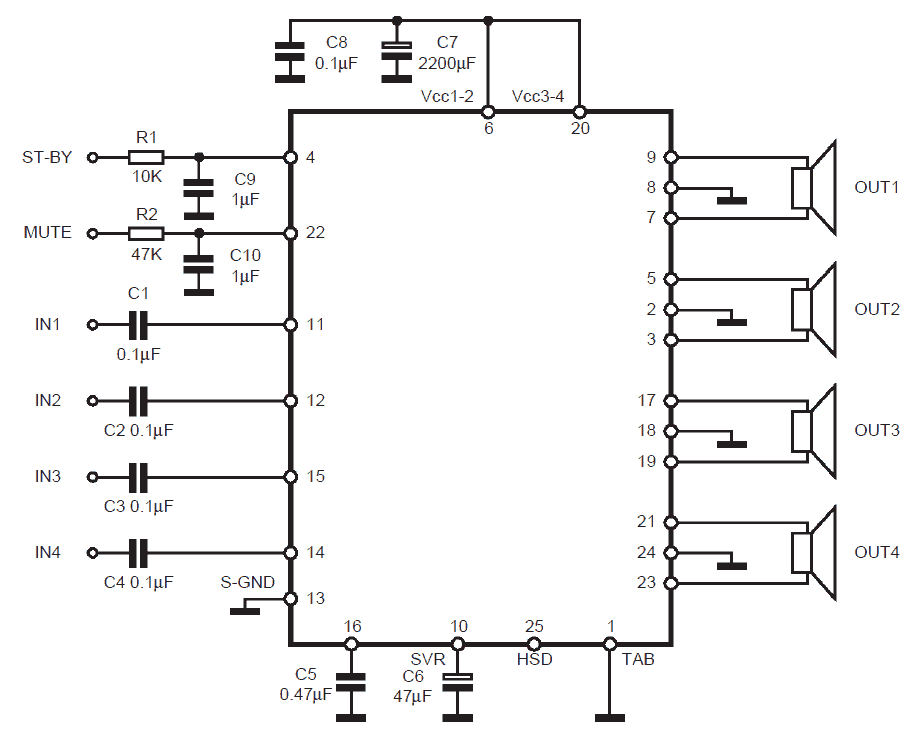
ИС воспроизведения голоса
Эта ИС воспроизведения голоса предлагает записанное сообщение, которое воспроизводится с заданной частотой. Воспроизведение перенесено на блок усиления звука.

ИС воспроизведения голоса
Реле
К реле - это один из видов переключателя работает электрически. Прохождение тока через катушку реле создает магнитное поле, которое притягивает рычаг и меняет контакты переключателя.

Реле
Голосовое управление роботом Намастэ
Робот Namaste может работать поэтапно вместе с результатами моделирования. Когда робот Намасте находится в первом состоянии, тогда серводвигатель s робота 2, 3, 4, 5 находятся в выключенном или нулевом состоянии. Голова робота Намасте чередуется из центра вправо, влево и затем обратно к центру из-за вращения серводвигателя 1 от 0 ° -180 °. Движение головы робота указывает на то, что робот Намасте ищет препятствие. Когда датчик эхо-сигнала обнаруживает какое-либо препятствие, положение головы робота возвращается к центру, а серводвигатель 1 останавливается под углом 90 ° и выключается. Он активирован в НИЗКОМ состоянии.
Когда серводвигатель 1 выключается, остальные двигатели, такие как сервопривод 4 и серво 5, включаются. Сигнальная линия срабатывает для правого и левого плеча робота Намасте. Теперь руки робота могут совершать движения. Сервомоторы плечевого пояса подключены к цифровым входным и выходным контактам платы Arduino. Но сигнальные линии или эти штырьки будут высокими, и положение сервопривода изменится на 90 °. Теперь сервопривод 4 и сервопривод 5 выключаются.
В итоге можно сделать вывод, что основная цель этого голосового управления робот должен предоставить услугу вежливо приветствовать людей, обнаруживая людей, идущих перед ним. Его можно использовать в различных общественных местах, таких как парки, торговые центры, вечеринки и т. Д. Мы надеемся, что вы лучше понимаете эту концепцию. Кроме того, любые вопросы относительно этой концепции или на основе Arduino проекты роботов , пожалуйста, дайте свои ценные предложения, комментируя в разделе комментариев ниже.
Фото:
- Плата Arduino ньякновости и просмотры
- Датчик пинга параллакс
- ИС воспроизведения голоса килаб
- Реле awdirect
- Намасте Робот Canstockphoto



{kind=link}
{kind=link}
{kind=link}
{kind=link}