В эту эпоху Индустриальная автоматизация , роботы используются для управления различными процессами для повышения точности и качества продукции. Выбор идеального двигателя для идеального робота всегда является сложной задачей при проектировании робота, особенно для промышленности. Правильный подбор электродвигатели в промышленных роботах требуется несколько параметров для учета управления рукой, положения, угловых и линейных перемещений.

Двигатели, используемые в промышленной робототехнике
Выбор двигателя - наименее понятная концепция для любителей робототехники, которая требует разработки стратегии и серьезного анализа. Она включает в себя определение требований к скорости, ускорению и крутящему моменту робота в зависимости от веса робота, размера колеса и области применения, в которой он должен быть реализован. Существует много типов двигателей. доступны на сегодняшнем рынке, но в основном это крошечные моторы пейджера, серводвигатели , линейные двигатели, шаговые двигатели и мотор-редукторы постоянного тока используются в промышленных роботах в зависимости от области их применения.
Неправильный выбор двигателя приводит к появлению робота-инвалида. Итак, какой тип двигателя лучше и подходит для создания реальных, точных и достаточных промышленных роботов для удовлетворения всех потребностей промышленных процессов с учетом всех реалистичных характеристик?
Здесь мы собрали некоторые мнения об этих двигателях от промышленных профессионалов для выбора соответствующего двигателя для промышленного применения.
Мы призываем вас прислушиваться к мнению экспертов, которые стремятся предоставить лучшие двигатели для промышленной робототехники с доступными двигателями постоянного тока, шаговыми, бесщеточными и серводвигателями для точных, экономичных и надежных движений роботов.
Ч. Сампат Кумар
M.tech в дизайне СБИС
Автор технического контента
 Двигатели постоянного тока доступны в широком диапазоне для непрерывной работы, но для этого требуются редукторы, подходящие для соответствующего применения. Шаговый двигатель не требует редуктора, так как его ступенчатый режим обеспечивает низкую скорость для определенных приложений. Наконец, серводвигатели используются для точного и точного управления, которое реализуется в операциях с обратной связью. Но для этого требуется дополнительная обратная связь и схема управления, поэтому он дороже, чем двигатель постоянного тока и шаговый двигатель. Таким образом, серводвигатели делают робота более надежным за счет его точного движения.
Двигатели постоянного тока доступны в широком диапазоне для непрерывной работы, но для этого требуются редукторы, подходящие для соответствующего применения. Шаговый двигатель не требует редуктора, так как его ступенчатый режим обеспечивает низкую скорость для определенных приложений. Наконец, серводвигатели используются для точного и точного управления, которое реализуется в операциях с обратной связью. Но для этого требуется дополнительная обратная связь и схема управления, поэтому он дороже, чем двигатель постоянного тока и шаговый двигатель. Таким образом, серводвигатели делают робота более надежным за счет его точного движения.
Вишванатх Пратхап
M.Tech в области электроэнергетики
Автор технического контента

Выбор и размещение Роботы обычно используются в различных отраслях промышленности, чтобы выбрать объект из одного места или места и поместить его в другое место или место. Для этого необходимо контролировать угловые перемещения шарниров роботов, что может быть достигнуто с помощью серводвигателей. Эти серводвигатели управляются с использованием данных ШИМ, передаваемых роботизированным контроллером для приведения в действие суставов роботов. Серводвигатели способны генерировать достаточный крутящий момент для быстрого перемещения объекта из положения остановки. Таким образом, они используются в качестве колес в военных и промышленных роботизированных транспортных средствах. Шаговые двигатели также могут использоваться для управления положением, но они будут потреблять энергию даже в период покоя только для фиксации и удержания заданного положения. Таким образом, серводвигатели обычно используются в промышленной робототехнике в качестве высокоэффективной замены шаговых двигателей.
С. Нареш Редди
M.tech во встроенной системе
Руководство по проекту
Структура механического робота должна контролироваться до перфорации.  rm задача. Существует три различных этапа управления роботом: восприятие, обработка и действие. Датчики передают роботу информацию о положении его суставов и его концевом эффекторе, затем эта информация обрабатывается в блоке управления и вычисляет соответствующий сигнал двигателю, который движется механически. Подавляющее большинство роботов использует электродвигатели. Неоднократно бесщеточные и щеточные двигатели постоянного тока используются в портативных роботах, а двигатели переменного тока используются в промышленных роботах. Эти двигатели предпочтительны в системах с более легкими нагрузками, и где преобладающей формой движения является вращательное движение.
rm задача. Существует три различных этапа управления роботом: восприятие, обработка и действие. Датчики передают роботу информацию о положении его суставов и его концевом эффекторе, затем эта информация обрабатывается в блоке управления и вычисляет соответствующий сигнал двигателю, который движется механически. Подавляющее большинство роботов использует электродвигатели. Неоднократно бесщеточные и щеточные двигатели постоянного тока используются в портативных роботах, а двигатели переменного тока используются в промышленных роботах. Эти двигатели предпочтительны в системах с более легкими нагрузками, и где преобладающей формой движения является вращательное движение.
Суреш Мегаджи
M. Tech в системах беспроводной связи
Автор технического контента

Если вы хотите заниматься «робототехникой» и ее применением в «промышленности», вам следует знать о «двигателях», которые используются в робототехнике, потому что робототехника в основном зависит от двигателей. Обычно «роботизированные машины» используются для различных приложений в производстве. Различные «двигатели», такие как постоянный ток, импульсный, шаговый, оптический привод, частичный поворот, двигатели на эффекте Холла и т. Д., Используются с некоторыми методами, чтобы применить их в промышленности и сделать их удобными, например
- Двигатели постоянного тока используются для приложений, ориентированных на батареи, более медленных, мобильных приложений.
- Везде, где нам нужно приложение, ориентированное на вращение, мы можем использовать шаговые двигатели, такие как униполярные и биполярные двигатели.
- Для движений головы и рук мы можем использовать неполнооборотные двигатели.
- Если мы хотим использовать магнитные поля, мы можем использовать эффект Холла, двигатели с оптическим приводом и т. Д.
Используя робототехнику, в которой используются интеллектуальные двигатели, мы можем сэкономить деньги, время, пространство, опасные перемещения и т. Д.
Аджай Сахаре
Директор по маркетингу

Промышленные роботы используются в промышленной производственной среде. Это руки, специально разработанные для таких применений, как сварка, транспортировка материалов, покраска и другие.
Не каждое мехатронное устройство, используемое в промышленных условиях, можно рассматривать как робота. Согласно определению ISO (Международной организации по стандартизации), автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем или более осям, считается промышленным роботом.
Двигатели, используемые в промышленной робототехнике:
- Двигатели переменного тока (AC)
- Двигатели постоянного тока (DC)
- Сервомоторы
- Шаговые двигатели.
1. Двигатели переменного тока подразделяются на асинхронные и синхронные. Например, асинхронный двигатель переменного тока представляет собой блок асинхронного типа, который по существу состоит из статора с проволочной обмоткой и ротора. Электропитание подключается к проводу, и переменный ток, протекающий по нему, индуцирует электромагнитное (ЭМ) поле в спиральном проводе с достаточно сильным полем, обеспечивающим силу для движения ротора. Синхронные двигатели - это двигатели с постоянной скоростью, которые работают синхронно с частотой сети переменного тока и обычно используются там, где требуется точная постоянная скорость.
2. Многие промышленные приложения, включая робототехнику, часто используют двигатели постоянного тока из-за простоты управления скоростью и направлением. Они способны работать в бесконечном диапазоне скоростей, от полной до нулевой, с широким диапазоном нагрузок.
Поскольку двигатели постоянного тока имеют высокое отношение крутящего момента к инерции, они могут быстро реагировать на изменения управляющих сигналов. Двигатель постоянного тока можно плавно регулировать до нулевого движения и мгновенно ускорять в обратном направлении без необходимости использования сложной схемы переключения мощности. Бесщеточные двигатели постоянного тока с постоянными магнитами обычно дороже щеточных, хотя они могут обеспечить преимущества в энергопотреблении и надежности.
Без коммутатора бесщеточные двигатели могут работать более эффективно и на более высоких скоростях, чем обычные двигатели постоянного тока. Большинство бесщеточных двигателей постоянного тока работают с трапецеидальной формой волны переменного тока, но некоторые из двигателей работают с синусоидальными волнами. Бесщеточные двигатели с синусоидальным приводом могут обеспечивать плавную работу на более низких скоростях с низкой пульсацией крутящего момента, что делает их идеальными для шлифования, нанесения покрытий и других применений, таких как чистовая обработка поверхностей.
В случае щеточных двигателей постоянного тока, если вы хотите, чтобы ваш двигатель вращался медленнее без потери мощности, вы можете использовать широтно-импульсную модуляцию (ШИМ). Это в основном означает очень быстрое включение и выключение двигателя. Таким образом, двигатель вращается с более низкой скоростью, как если бы было приложено более низкое напряжение, не заботясь о мощности.
Обычно крутящий момент, создаваемый щеточным электродвигателем постоянного тока, слишком мал, а скорость слишком велика, чтобы быть полезной. Итак, редукторы обычно используются для уменьшения скорости и увеличения крутящего момента.
3. Серводвигатели используются в системах с обратной связью с цифровым контроллером. Контроллер отправляет команды скорости на усилитель драйвера, который, в свою очередь, питает серводвигатель. Некоторые формы устройства обратной связи, такие как резольвер или энкодер, предоставляют информацию о положении и скорости серводвигателя. Резольвер или энкодер могут быть встроены в двигатель или расположены удаленно. Благодаря системе с обратной связью серводвигатель может работать с определенным профилем движения, который запрограммирован в контроллере.
4. Шаговые двигатели могут работать с обратной связью или без нее, при этом вращение двигателя разбито на небольшие угловые шаги. Он управляется импульсными командными сигналами и может останавливаться точно в заданной точке без необходимости использования тормозов или узлов сцепления. При отключении питания шаговый двигатель с постоянными магнитами обычно остается в своем последнем положении. Можно поддерживать синхронизацию нескольких шаговых двигателей, управляя ими от общего источника.
Дев Десаи
Директор по маркетингу 
Если вы планируете заняться робототехникой, вам нужно будет ознакомиться со многими типами доступных двигателей. Все движения робототехники так или иначе моторизованы, поэтому важно знать, какие у вас варианты.
Двигатели постоянного тока
Помимо работы от батареи, направление движения двигателя постоянного тока определяется полярностью входной мощности. Это абсолютная необходимость для роботизированных функций. К счастью, этот тип двигателя бывает самых разных размеров, требований к напряжению и доступен везде.
Ниже приведены различные типы двигателей.
- Двигатель базы мобильности
- Высокоскоростной мотор для хобби
- Ременный привод двигателя
- Слот автомобильный мотор
- Импульсный
- Мотор адаптированный к руке
- Биполярный шаговый двигатель с указателем
Биомотор
Биометалл - это удивительное вещество, которое существует уже несколько лет и имеет ряд применений в области робототехники. На иллюстрации видно, что кусок биометаллической проволоки сжимается на пять процентов от своей длины, если к ней приложить всего несколько вольт. После многих лет испытаний биопроволока доказала свою прочность, надежность и становится все более полезной по мере появления новых продуктов. Его несколько меньшее время отклика делает его идеальным для роботизированных рук и кистей, где рывки могут быть проблематичными. Длинный кусок проволоки может произвести значительное движение, если растянуть его на всю длину руки робота. В настоящее время на коммерческом рынке есть комплекты роботизированных манипуляторов, в которых используется биометалл.
Реле
Реле в робототехнике почти всегда используется для отключения питания, предназначенного для двигателей, от источника питания для работы компьютера. Двигатели из-за своего низкого импеданса предъявляют высокие требования к источникам питания и создают многочисленные сбои, с которыми компьютеры не могут мириться. Поэтому рекомендуется использовать отдельный источник сильного тока только для двигателей.
Соленоиды
Соленоиды лучше всего использовать в качестве устройств управления манипуляторами или переключателей. Их движение быстрое и сильное, поэтому в захватах почти всегда используется пружина, чтобы смягчить действие. Как вы можете видеть на иллюстрации, контрольные провода закрывают зажим. Эти провода управления также могут действовать как возвратные пружины. Такие захватчики чаще встречаются в производственных линиях, где задача очень размеренная и охватывает узкие параметры.
Вторичные функции
Большинство двигательных функций связаны с подвижностью, рукой, головой или другими видимыми внешними движениями, однако некоторые двигательные движения не так заметны. Большие промышленные роботы используют гидравлические системы, в которых используются двигатели насосов для создания рабочего давления гидравлической жидкости. Еще одна важная второстепенная функция двигателей - управляемая регулировка. Для повышения точности потенциометры, которые сопрягаются с двигателями, обычно являются многооборотными.
Вывод
Роботы могут быть очень сложными устройствами, требующими большого количества движений с приводом от двигателя. Эта статья предназначена для того, чтобы дать обзор ряда устройств, с которыми вы можете иметь дело как конструктор роботов. Было бы неплохо начать с исследования поставщиков робототехнического оборудования и имеющихся расходных материалов. Сейчас доступно огромное количество продуктов, и Интернет позволяет легко их найти, изучить и использовать. Какими бы ни были ваши потребности, немного изобретательности и решимости, которые, похоже, есть у всех конструкторов роботов, должны сослужить вам хорошую службу.
Самадан Вандре
Директор по маркетингу
«Двигатели, используемые в робототехнике»
- Двигатель базы мобильности

- Высокоскоростной мотор для хобби
- Ременный привод двигателя
- Слот автомобильный мотор
- Импульсный
- Мотор адаптированный к руке
- Биполярный шаговый двигатель с указателем

Двигатели большего размера лучше всего подходят для мобильных баз, которые позволяют роботам маневрировать на местности. Некоторые из этих двигателей поставляются с коробками передач для обеспечения более низкой скорости и крутящего момента, необходимых для мобильности. Понижение напряжения на двигателе также может замедлить его до более желательной скорости. Только эксперимент может определить, будет ли ваш двигатель работать с более низким напряжением. Если это так, вы избавили себя от множества проблем, если нет, есть другие способы замедлить двигатели. Некоторые высокоскоростные двигатели могут использоваться, если используются червячные или винтовые передачи.
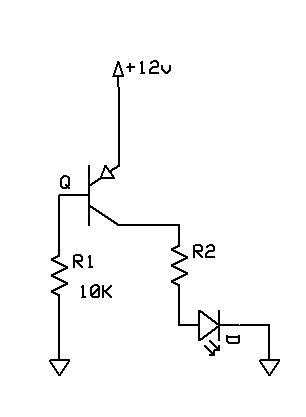
Пример винтовой передачи можно увидеть на иллюстрации манипулятора. Когда двигатель вращается по часовой стрелке, узел болта притягивается к двигателю, и рычаг сжимается, а когда он вращается против часовой стрелки, рычаг выдвигается. Хотя вал двигателя вращается быстро, действие рычага происходит значительно медленнее из-за редукции винта. На этой следующей иллюстрации схемы двигателя мы видим двигатель постоянного тока, управляемый силовым транзистором. Релейный переключатель (Double Pole Double Throw) определяет направление. Транзистор Q1 должен быть силовым транзистором, чтобы выдерживать большую нагрузку двигателя.
Импульсные двигатели
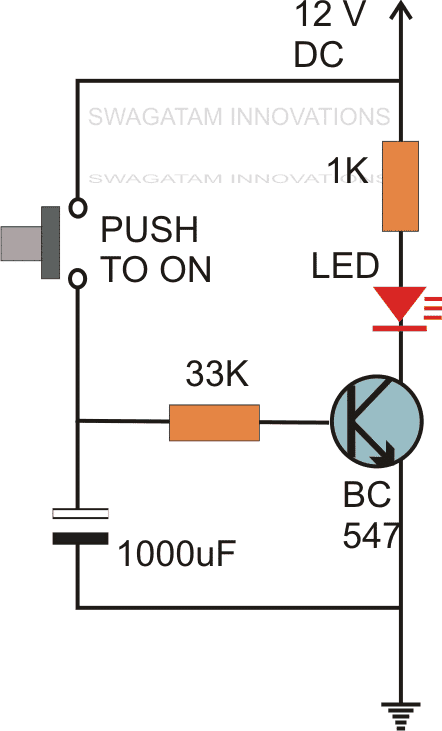
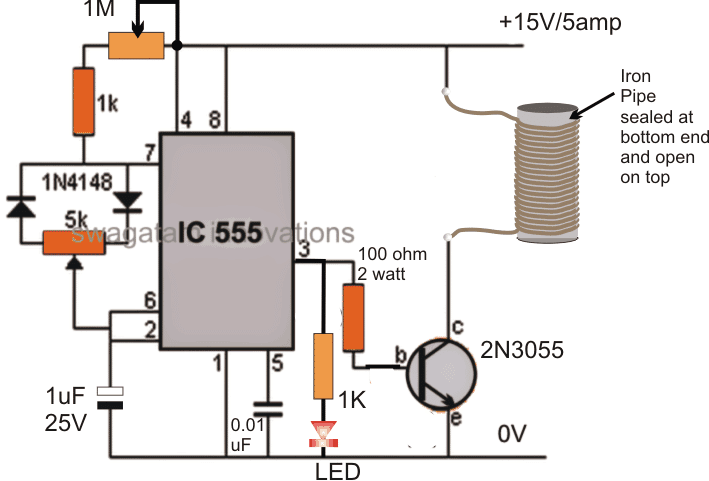
Некоторые двигатели получают снижение скорости за счет импульсного сигнала постоянного тока. Этот сигнал обычно составляет около ста Гц. Скорость двигателя можно изменить, изменяя ширину импульса, а не частоту импульса. Подобные моторы можно найти в магазинах электроники, и их легко идентифицировать по подключенному к нему генератору импульсов. Тем не менее, любой двигатель постоянного тока может приводиться в движение источником импульсов, и схема такой цепи прилагается.
Как видите, в качестве возбуждающего генератора был выбран таймер 555, который выдает частоту примерно 100 Гц. Резистор R1 и конденсатор C стабилизируют и изолируют генератор импульсов от выбросов, создаваемых двигателем. Поскольку это устройство может потреблять от источника питания от 6 до 12 вольт, вы можете изменить номинал конденсаторов C4 и C6 для получения лучших результатов в зависимости от того, какое напряжение вы используете. Импульсный выход снимается с третьего контакта IC1 и подается на второй контакт IC2, также на таймер 555.
Второй таймер изменяет ширину импульса, регулируя напряжение, которое подается на конденсатор C6 через потенциометр R5 и резистор R6. Длительность импульса определяет скорость двигателя, а ширину импульса можно регулировать от 10% до 100%.
Транзистор Q1 принимает сигнал с широтно-импульсной модуляцией через резистор R7. Поскольку Q1 является слаботочным устройством, он передает сигнал на Q2, силовой транзистор, который может обрабатывать ток, потребляемый двигателем. Эти транзисторы не критичны, и подойдет практически любой тип слаботочных транзисторов. Реле будет определять направление вращения двигателя.
Шаговые двигатели
Самый сложный из всех моторов - шаговый. Как следует из названия, двигатель вращается с шагом в градус и работает в импульсном режиме. Точная степень поворота на шаг может варьироваться от одного производителя или модели к другой, но 20 градусов популярны и дают 18 шагов за один полный оборот. Существует два основных типа шаговых двигателей: биполярные и униполярные. Как вы можете видеть на схеме шагового двигателя, биполярный - это просто двигатель с двумя катушками.
Униполярный тип - это две катушки с центральными выводами. Если игнорировать центральные отводы, униполярный двигатель может работать как биполярный. На две катушки в шаговом двигателе поступают пошаговые импульсы поочередно полярности от катушки к катушке. Карта этого процесса представлена на рабочей диаграмме, чтобы графически представить двигательное действие. В отличие от обычных двигателей постоянного тока, крутящий момент уменьшается с увеличением скорости. Для продвижения шагового двигателя также требуется специальный тип привода, который должен поставляться вместе с двигателем. Не рекомендуется создавать блок управления, если двигатель не поставляется с хорошей спецификацией, содержащей рекомендации по компонентам и полную схему.
Для двигателя могут потребоваться буферы, чтобы изолировать его от системы привода, или может потребоваться отдельный источник питания. Какими бы ни были потребности, они могут значительно отличаться от двигателя к двигателю. Магазины для хобби - самые надежные поставщики шаговых двигателей, и хотя излишки электронных магазинов могут иногда иметь их, они могут не включать необходимую информацию о спецификациях.
Двигатели с частичным оборотом
Для некоторых функций робота требуется только частичный поворот, например движения головы или рук. Самый простой способ добиться этого - использовать ограничители положения и скользящие шестерни. Иллюстрация механических деталей этого типа двигателя приведена выше. Микровыключатели можно использовать в качестве датчиков остановки, чтобы выключить питание и сбросить направление для следующего действия.
Нижнее колесо соединено с двигателем, а верхнее колесо отделено от нижнего колеса круглым куском войлока. Когда нижнее колесо поворачивается, верхнее колесо вращается вместе с ним, пока стопорный штифт не войдет в контакт с микровыключателем. В некоторых конструкциях не предусмотрена остановка двигателя, поэтому простые винты с проставками будут выполнять функцию остановки двигателя.
Биомотор
Биометалл - это удивительное вещество, которое существует уже несколько лет и имеет ряд применений в области робототехники. На иллюстрации видно, что кусок биометаллической проволоки сжимается на пять процентов от своей длины, если к ней приложить всего несколько вольт. После многих лет испытаний биопроволока доказала свою прочность, надежность и становится все более полезной по мере появления новых продуктов. Его несколько меньшее время отклика делает его идеальным для роботизированных рук и кистей, где рывки могут быть проблематичными. Длинный кусок проволоки может произвести значительное движение, если растянуть его на всю длину руки робота. В настоящее время на коммерческом рынке есть комплекты роботизированных манипуляторов, в которых используется биометалл.
Бхаскар Сингх
Директор по маркетингу
 Промышленные роботы - это устройства, которые в определенной степени дублируют движение человека, что снижает опасность, обеспечивая большую силу, точность и непрерывность. Им требуется широкий диапазон движений с приводом от двигателя в зависимости от их режимов работы, управления, используемых инструментов и выполняемой работы. Промышленный роботизированный двигатель должен иметь потенциал для выполнения более широкого круга задач, чем обычные двигатели, чтобы специализироваться на конкретной задаче.
Промышленные роботы - это устройства, которые в определенной степени дублируют движение человека, что снижает опасность, обеспечивая большую силу, точность и непрерывность. Им требуется широкий диапазон движений с приводом от двигателя в зависимости от их режимов работы, управления, используемых инструментов и выполняемой работы. Промышленный роботизированный двигатель должен иметь потенциал для выполнения более широкого круга задач, чем обычные двигатели, чтобы специализироваться на конкретной задаче.
Электродвигатели чаще всего используются в промышленной робототехнике из-за высокоэффективного энергоснабжения и относительно простой конструкции, что делает их более популярным вариантом с точки зрения соотношения цены и качества во всех аспектах - установке, техническом обслуживании и ремонте.
В зависимости от выполняемой работы используются разные двигатели для разных целей. Например, двигатели постоянного тока используются для движения в направлениях по часовой стрелке и против часовой стрелки, примеры - в кранах и подъемниках, импульсные двигатели используются для обеспечения импульсных перемещений с использованием ширины импульса постоянного тока, неполнооборотные двигатели используются для обеспечения движений, подобных голове и руке, и наиболее сложные. - шаговые двигатели используются для обеспечения ступенчатых оборотов с шагом в градусы.
Более того, в зависимости от типа работы, двигатели с разными номинальными характеристиками и размерами используются для разных целей. Существует несколько типов двигателей, каждый из которых имеет различное применение в разных местах в зависимости от работы и конструкции робота.
Мохан Кришна. L
Руководитель отдела продаж и поддержки
Роботы используются для выполнения работы, которую могут выполнять люди, и есть много причин, по которым роботы лучше людей. 
Есть два основных типа роботов: -
Мобильный робот: Это движение на ногах или по рельсам.
Стационарный робот: У этого есть фиксированная база.
Стационарные роботы, как правило, можно использовать для захвата объектов или выполнения другой работы, которая включает в себя дотянуться до объекта.
Рука робота состоит из трех основных частей:
- Плечевой сустав
- Лучезапястный сустав
- Фиксированная база
Нужен робот для
- Умение работать быстро и в опасной среде.
- Возможность повторять задания снова и снова.
- Умение работать аккуратно.
- Умение выполнять разные задачи.
- Эффективность.
Электродвигатель - это устройство, преобразующее электрическую энергию в механическую, то есть электромеханическое устройство. Существует два типа электродвигателей, такие как электродвигатели переменного тока и электродвигатели постоянного тока.
Мотор, используемый в промышленной робототехнике, - это серводвигатель. Серводвигатель - это простой электродвигатель, управляемый с помощью сервомеханизма. Если управляемый двигатель работает от переменного тока, он называется серводвигателем переменного тока, в противном случае серводвигателем постоянного тока. Большинство серводвигателей могут вращаться от 90 до 180 градусов. Даже некоторые из них вращаются через полные 360 градусов или более. Некоторые из приложений серводвигателя в робототехнике
- Применение серводвигателя в робототехнике, т. Е. Простой робот для захвата и размещения, он используется для выбора объекта из одного положения и размещения объекта в другом.
- Серводвигатель в конвейерах используется
- в промышленных производственно-сборочных единицах для передачи объекта с одного сборочного участка на другой. Например: - Процесс наполнения бутылок.
- Серводвигатель в роботизированном транспортном средстве здесь Серводвигатель, используемый в колесах. Так как используется серводвигатель непрерывного вращения.
Динеш.П
Директор по маркетингу
 Роботы будут представлены, чтобы уменьшить тяжелый человеческий труд и помочь создать людям удачу для будущих разработок. Термин «роботы» означает машину, которая имитирует различные человеческие характеристики. Робототехника включает знания в области механики, электроники, электротехники и информатики. В роботах используются двигатели постоянного тока, шаговые двигатели и сервомоторы.
Роботы будут представлены, чтобы уменьшить тяжелый человеческий труд и помочь создать людям удачу для будущих разработок. Термин «роботы» означает машину, которая имитирует различные человеческие характеристики. Робототехника включает знания в области механики, электроники, электротехники и информатики. В роботах используются двигатели постоянного тока, шаговые двигатели и сервомоторы.
Где,
- Двигатели постоянного тока используются для непрерывного вращения
- Шаговые двигатели используются для вращения на несколько градусов
- Сервомоторы используются для позиционирования, их можно использовать в автомобилях и самолетах.
Ганеш .J
Директор по маркетингу 
Роботы используются для выполнения работы, которую могут выполнять люди, а также сокращают человеческие усилия и время, а также улучшают качество.
- Двигатели переменного тока (AC)
- Двигатели постоянного тока (DC)
- Сервомоторы
- Шаговые двигатели.