Роботы могут использоваться во многих отраслях промышленности, в военной и бытовой сфере. Одно из основных применений роботов - это ценность для людей. Будь то какие-либо опасные ситуации, такие как возникновение пожара или место, заполненное наземными минами, роботы могут легко найти выход из этих проблем. Итак, давайте посмотрим на эти два типа роботов - робот для обнаружения наземных мин и робот для пожаротушения.
Робот для обнаружения мин
Как почувствовать наземную мину с помощью роботов?
Одно из важнейших приложений робототехники - защита. Робот в армии - это дистанционно управляемый автомобиль со многими уникальными функциями. Это может быть роботизированный автомобиль с камерой для шпионажа, роботизированный автомобиль с ЛАЗЕРНОЙ пушкой для обнаружения и уничтожения целей или робот с металлоискатель для обнаружения фугаса.
Одним из традиционных и традиционных способов обнаружения мин является использование обученных людей, которые вручную ищут металлы или мины с помощью металлоискателя. Однако это небезопасно, дорого и медленно.
Чтобы преодолеть эту проблему, предпочтительнее использовать гораздо более совершенную систему.
Несколько способов обнаружения наземных мин:
- Использование робота, который может вставить зонд в землю, чтобы обнаружить объекты под почвой и определить тип материала.
- Использование робота с металлоискателем, который может обнаруживать присутствие проводящих элементов, таких как мины, и тревожить пользователя.
Прежде чем вдаваться в подробности о втором типе, то есть о роботах с металлоискателем, позвольте нам вкратце вспомнить два важных термина - наземные мины и металлоискатели.
К Фугас представляет собой взрывное устройство, намеренно размещенное под землей, которое взрывается при срабатывании давления. Согласно статистическому отчету, в 70 странах мира установлено около 100 миллионов наземных мин. Однажды установленная мина может работать до 50 лет. Разве это не опасно !!

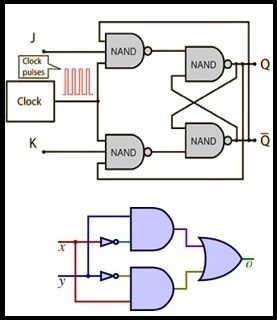
Базовый металлоискатель работает по принципу индукционного закона Фарадея. Он состоит из катушки, которая возбуждается для создания вокруг нее пульсирующего магнитного поля. Когда катушка оказывается рядом с проводящим элементом, таким как металл (мина), в ней индуцируется электрический ток (вихревой ток). Индуцированный вихревой ток вызывает развитие электромагнитного поля вокруг металла, которое ретранслируется на катушку, которая создает электрический сигнал, который анализируется. Чем больше расстояние между катушкой и металлом, тем слабее магнитное поле.
Простой прототип:

Простой прототип роботизированного автомобиля с металлоискателем
Проектирование робота:
Роботизированный автомобиль состоит из следующих агрегатов:
- Прямоугольное основание для поддержки всей конструкции робота с двумя колесами для движения.
- Пара двигателей постоянного тока для обеспечения необходимого движения роботу.
- Блок управления, состоящий из РЧ-приемника, который принимает командные сигналы от блока передатчика для управления приводом двигателя и соответствующего управления двигателями.
- При обнаружении металла срабатывает цепь металлоискателя и зуммер.
Как работает робот:
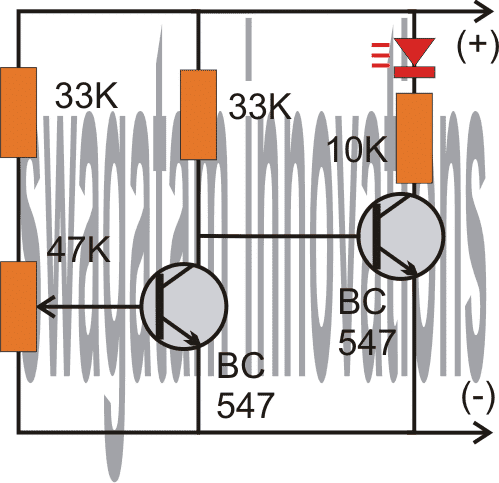
Схема металлоискателя, встроенная в схему управления роботом, состоит из транзистора, который приводится в действие схемой настроенного генератора, состоящей из катушки. Когда обнаруживается металл и электрический ток повторно проходит через катушку, транзистор 1 находится в состоянии «включено» и переводит другой транзистор 2 в состояние «выключено». Этот транзистор3, в свою очередь, переводит другой транзистор в выключенное состояние. Этот конкретный транзистор 3 соединен с другим транзистором 4, который подключен таким образом, что он находится в рабочем состоянии, когда его управляющий транзистор 3 находится в выключенном состоянии. Транзистор 4 подключен так, что при условии, зуммер и светодиод получают надлежащее смещение и начинают проводить.

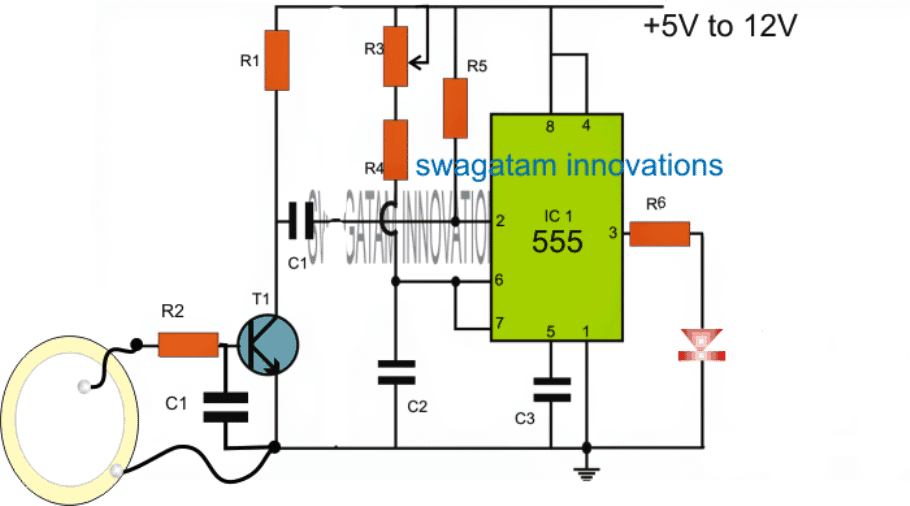
Блок-схема металлоискателя
Светодиод начинает светиться, и зуммер начинает звонить. Таким образом, при обнаружении металла раздастся звуковой сигнал и загорится светодиод.
Управление роботом:
Простым прототипом можно управлять с помощью радиочастотной связи, которая представляет собой систему связи ближнего действия. Команды передаются с помощью передатчика и принимаются приемником, встроенным в схему робота для управления движением робота.

Блок-схема секции передатчика
Передатчик состоит из набора кнопок, таких как вперед, назад, стоп, влево и вправо, которые нажимаются для обеспечения движения робота в любом желаемом направлении. Кнопки подключены к входному порту микроконтроллера. Микроконтроллер при получении этих сигналов вырабатывает соответствующий 4-битный сигнал в параллельной форме через другой порт ввода-вывода, к которому подключена микросхема кодировщика. Кодер преобразует эти сигналы в последовательную форму данных. Передатчик RF модулирует эти последовательные данные, которые передаются через антенну.

Блок-схема секции приемника
Секция приемника, установленная на роботе, состоит из радиочастотного приемника, который демодулирует этот сигнал. ИС декодера принимает этот сигнал в последовательной форме и вырабатывает на своем выходе соответствующие 4-битные параллельные данные. Микроконтроллер получает эти данные и, соответственно, подает управляющий сигнал на микросхему драйвера двигателя LM293D, которая приводит в действие оба двигателя.
Пожарный роботизированный автомобиль:
Концепция чего-либо пожарный роботизированный автомобиль борется с огнем. В последние годы произошло несколько серьезных аварий, включая взрывы бомб и пожаров. Нам было известно о крупных пожарах, таких как атомные электростанции, нефтяные, газовые цистерны и химические заводы, крупные пожарные промышленные компании в этих местах после того, как начали пожар, могут привести к очень серьезным последствиям. Тысячи людей погибли в результате этого инцидента. Это пожаротушение роботизированный автомобиль технологии. Этот роботизированный автомобиль использовался для поиска огня и борьбы с пожарами.

Пожарный робот-робот
Принцип работы пожарного роботизированного автомобиля:
Автомобиль-робот с цистерной для воды. Насос управляется посредством беспроводной связи (RF и мобильная связь). Конец передатчика подключен к кнопкам. С помощью этой кнопки команды отправляются на приемник и управляют моментом робота-подобного вперед, назад, влево, вправо. К микроконтроллеру подключены три двигателя.

Блок-схема передатчика

Блок-схема приемника
Радиочастотный передатчик действует как радиочастотный пульт дистанционного управления в диапазоне 200 метров. В доме, офисе и на производстве датчики пожара хранятся в определенных местах, когда пожар происходит рядом с датчиком пожара. Датчики определяют, что соответствующий бит передается на РЧ-приемник. ВЧ-приемник интегрирован с микроконтроллером. Когда РЧ-приемник получает сигналы о передаче информации на микроконтроллер, робот движется к датчикам пожара. Расположение датчиков хранится в микроконтроллере. Как только робот достигает желаемого места, робот останавливается и активирует опрыскиватель для этого огня. После выстрела робот переходит в исходное положение. Вся схема управляется микроконтроллером.
Типы пожарных роботов:
Домашний пожарный роботизированный автомобиль :
Действие поля ограничено текущим Флором дома. Этот робот использует множество предметов домашнего обихода, чтобы загореться, когда кто-то спит или находится вдали. Этот робот используется для обеспечения безопасности дома, и с помощью этого приложения во Флоре открываются все двери, потому что этот автомобиль перемещается из одного места в другое в доме. Зона пожаротушения должна быть безопасной, чтобы не допустить новой аварии. Дополнительная особенность этого робота - работать на большом расстоянии.
Промышленное пожаротушение:
Большинство предприятий сталкиваются с проблемами пожаров, таких как газ, бензин, атомные электростанции, химическая промышленность. Огромный ущерб, и все больше людей погибает вблизи прилегающих территорий. У этого робота есть сила разносить огонь внутри зоны горения, чтобы обеспечить неограниченное количество воды. Пожар вызывает ухудшение видимости, сильную жару и многие другие ситуации, которые могут привести к травмам.
Борьба с лесными пожарами:
Лесные пожары очень опасны. Это может быть кратковременное сжигание большой площади леса. Даже городские пожарные службы вынуждены бороться с лесными пожарами в окрестностях города. Несколько лет назад в 1990-е годы погибло около 152 пожарных. Лесные пожарные роботы используют для тушения пожара и тушения пожара. Этот робот использует внешнее устройство управления для беспроводной связи. К модулю подсоединяется выходной конец, который используется для тушения лесного пожара робота. Такие приложения, как датчик давления, датчик температуры, датчик смога, инфракрасный датчик, используются для управления роботом для тушения лесных пожаров.
По запросу!
Несмотря на то, что я дал базовое представление о роботе с металлоискателем, все еще остается главный вопрос: как вести робота по неровной местности, которая неизвестна, особенно в условиях, подверженных сильным дождям, пыли и горячему диапазону температур. Чтобы найти ответ и оставить свои комментарии.