
Почти каждое механическое развитие, которое мы видим вокруг себя, осуществляется электродвигателем. Электрические машины - это способ преобразования энергии. Двигатели потребляют электрическую энергию и производят механическую энергию. Электродвигатели используются для питания сотен устройств, которые мы используем в повседневной жизни. Электродвигатели в целом подразделяются на две разные категории: двигатели постоянного тока (DC) и двигатели переменного тока (AC). В этой статье мы собираемся обсудить двигатель постоянного тока и его работу. А также как работают редукторные двигатели постоянного тока.
Что такое двигатель постоянного тока?
К Двигатель постоянного тока - это электродвигатель который работает от постоянного тока. В электродвигателе работа зависит от простого электромагнетизма. Проводник с током создает магнитное поле, и когда он помещается во внешнее магнитное поле, он сталкивается с силой, пропорциональной току в проводнике и силе внешнего магнитного поля. Это устройство, преобразующее электрическую энергию в механическую. Он работает на том факте, что проводник с током, помещенный в магнитное поле, испытывает силу, которая заставляет его вращаться относительно исходного положения. Практический двигатель постоянного тока состоит из обмоток возбуждения, обеспечивающих магнитный поток, и якоря, который действует как проводник.

Бесщеточный двигатель постоянного тока
Вклад бесщеточный двигатель постоянного тока это ток / напряжение, а его выход - крутящий момент. Понять работу двигателя постоянного тока очень просто из базовой схемы, показанной ниже. Двигатель постоянного тока в основном состоит из двух основных частей. Вращающаяся часть называется ротором, а неподвижная часть также называется статором. Ротор вращается относительно статора.
Ротор состоит из обмоток, которые электрически связаны с коммутатором. Геометрия щеток, контактов коммутатора и обмоток ротора такова, что при подаче питания полярности обмотки под напряжением и магнитов статора смещены, и ротор будет вращаться до тех пор, пока он почти не будет выпрямлен полевыми магнитами статора.
Когда ротор достигает выравнивания, щетки перемещаются к следующим контактам коммутатора и включают следующую обмотку. Вращение меняет направление тока через обмотку ротора, вызывая переворот магнитного поля ротора, заставляя его продолжать вращаться.
Конструкция двигателя постоянного тока
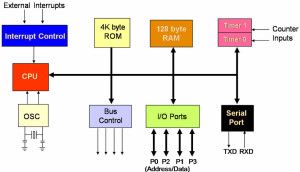
Конструкция двигателя постоянного тока показана ниже. Очень важно знать его конструкцию, прежде чем узнавать, что она работает. Важнейшими частями этого двигателя являются якорь и статор.

ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Катушка якоря - это вращающаяся часть, а неподвижная часть - статор. В этом случае катушка якоря подключена к источнику постоянного тока, который включает в себя щетки, а также коммутаторы. Основная функция коммутатора - преобразовывать переменный ток в постоянный, индуцируемый в якоре. Подача тока может быть обеспечена с помощью щетки от вращающейся части двигателя к неактивной внешней нагрузке. Расположение якоря может быть выполнено между двумя полюсами электромагнита или постоянным.
Детали двигателя постоянного тока
В двигателях постоянного тока существуют различные популярные конструкции двигателей, такие как бесщеточные двигатели с постоянным магнитом, последовательные, с составной обмоткой, шунтирующие шунты или стабилизированные шунты. В целом, части двигателя постоянного тока в этих популярных конструкциях одинаковы, но принцип их работы одинаков. Основные части двигателя постоянного тока включают следующее.
Статора
Стационарная часть, такая как статор, является одной из частей двигателя постоянного тока, которая включает в себя обмотки возбуждения. Основная функция этого - получить запас.
Ротор
Ротор - это динамическая часть двигателя, которая используется для создания механических оборотов агрегата.
Кисти
Щетки, использующие коммутатор, в основном работают как мост, чтобы прикрепить неподвижную электрическую цепь к ротору.
Коммутатор
Это разрезное кольцо с медными сегментами. Это также одна из самых важных частей двигателя постоянного тока.
Обмотки возбуждения
Эти обмотки сделаны из полевых катушек, известных как медные провода. Эти обмотки охватывают примерно прорези полюсных наконечников.
Обмотки якоря
Эти обмотки в двигателе постоянного тока имеют два типа конструкции, такие как Lap и Wave.
Иго
Магнитная рамка, такая как ярмо, иногда изготавливается из чугуна или стали. Работает как охранник.
Поляки
Полюса в двигателе состоят из двух основных частей, таких как полюсный сердечник и полюсные наконечники. Эти важные части соединены друг с другом гидравлической силой и соединены с вилкой.
Зубы / прорезь
Непроводящие вкладыши паза часто застревают между стенками паза, а также катушками для защиты от царапин, механической поддержки и дополнительной электрической изоляции. Магнитный материал между пазами называется зубцами.
Корпус двигателя
Корпус двигателя поддерживает щетки, подшипники и железный сердечник.
Принцип работы
Электрическая машина, которая используется для преобразования энергии из электрической в механическую, известна как двигатель постоянного тока. В Принцип работы двигателя постоянного тока заключается в том, что когда проводник с током находится внутри магнитного поля, он испытывает механическую силу. Это направление силы может быть определено с помощью правила левой руки Флемминга, а также ее величины.
Если первый палец вытянут, второй палец, а также большой палец левой руки будут расположены вертикально друг к другу, и основной палец указывает направление магнитного поля, следующий палец указывает текущее направление, а большой палец, похожий на третий, означает направление магнитного поля. направление силы, которое ощущается через проводник.
F = BIL ньютонов
Где,
«B» - плотность магнитного потока,
«Я» - текущее
«L» - длина проводника в магнитном поле.
Когда обмотка якоря подводится к источнику постоянного тока, ток будет устанавливаться внутри обмотки. Обмотка возбуждения или постоянные магниты создают магнитное поле. Таким образом, проводники якоря будут испытывать силу из-за магнитного поля, основанного на вышеуказанном принципе.
Коммутатор спроектирован как секции для достижения однонаправленного крутящего момента, иначе путь силы перевернулся бы каждый раз, как только путь движения проводника перевернется в магнитном поле. Итак, это принцип работы двигателя постоянного тока.
Типы двигателей постоянного тока
Ниже рассматриваются различные типы двигателей постоянного тока.
Редукторные двигатели постоянного тока
Мотор-редукторы имеют тенденцию снижать скорость двигателя, но с соответствующим увеличением крутящего момента. Это свойство очень удобно, поскольку двигатели постоянного тока могут вращаться со скоростью, слишком высокой для электронного устройства. Мотор-редукторы обычно состоят из щеточного двигателя постоянного тока и редуктора, прикрепленного к валу. Двигатели различаются как приводные от двух соединенных между собой агрегатов. Он имеет множество приложений из-за стоимости проектирования, упрощения и создания приложений, таких как промышленное оборудование, приводы, медицинские инструменты и робототехника.
- Ни один хороший робот не может быть построен без шестеренок. Учитывая все обстоятельства, очень важно хорошее понимание того, как шестерни влияют на такие параметры, как крутящий момент и скорость.
- Шестерни работают по принципу механического преимущества. Это означает, что, используя разные диаметры шестерен, мы можем менять скорость вращения и крутящий момент. Роботы не имеют желаемого отношения скорости к крутящему моменту.
- В робототехнике крутящий момент лучше скорости. С шестеренками можно менять высокую скорость на лучший крутящий момент. Увеличение крутящего момента обратно пропорционально снижению скорости.

Редукторные двигатели постоянного тока
Снижение скорости двигателя постоянного тока с редуктором
Снижение скорости передачи состоит из того, что маленькая шестерня приводит в движение большую шестерню. В редукторе может быть несколько комплектов этих редукторов.

Снижение скорости мотор-редуктора постоянного тока
Иногда целью использования редукторного двигателя является уменьшение скорости вращения вала двигателя в приводимом устройстве, например, в небольших электрических часах, где крошечный синхронный двигатель может вращаться со скоростью 1200 об / мин, однако его значение снижается до одного об / мин для привода. секундная стрелка и дополнительно уменьшенная в часовом механизме для управления минутной и часовой стрелками. Здесь величина движущей силы не имеет значения, пока ее достаточно для преодоления фрикционных ударов часового механизма.
Двигатель постоянного тока серии
Серийный двигатель - это двигатель постоянного тока, в котором обмотка возбуждения внутри последовательно соединена с обмоткой якоря. Серийный двигатель обеспечивает высокий пусковой момент, но никогда не должен работать без нагрузки и способен перемещать очень большие нагрузки на валу при первом включении. Серийные двигатели также известны как двигатели с последовательной обмоткой.
В последовательных двигателях обмотки возбуждения соединены последовательно с якорем. Напряженность поля изменяется с увеличением тока якоря. Когда его скорость снижается из-за нагрузки, серийный двигатель развивает более высокий крутящий момент. Его пусковой момент больше, чем у других двигателей постоянного тока.
Он также может легче излучать тепло, накопленное в обмотке, из-за большого количества протекающего тока. Его скорость значительно меняется между полной и нулевой нагрузкой. Когда нагрузка снимается, скорость двигателя увеличивается, а ток через якорь и катушки возбуждения уменьшается. Работа больших машин без нагрузки опасна.

Мотор серии
Ток через якорь и катушки возбуждения уменьшается, сила силовых линий вокруг них ослабевает. Если бы сила магнитных линий вокруг катушек уменьшалась с той же скоростью, что и ток, протекающий через них, то и те, и другие уменьшались бы с той же скоростью при
при котором скорость двигателя увеличивается.
Преимущества
К преимуществам серийного двигателя можно отнести следующее.
- Огромный пусковой момент
- Простая конструкция
- Проектировать легко
- Простое обслуживание
- Экономически эффективным
Приложения
Двигатели серии могут производить огромную крутящую мощность, крутящий момент из состояния покоя. Эта характеристика делает серийные двигатели подходящими для небольших электроприборов, универсального электрического оборудования и т. Д. Серийные двигатели не подходят, когда требуется постоянная скорость. Причина в том, что скорость серийных двигателей сильно меняется в зависимости от нагрузки.
Шунтирующий двигатель
Шунтовые двигатели - это параллельные двигатели постоянного тока, в которых обмотки возбуждения шунтированы или подключены параллельно обмотке якоря двигателя. Шунтирующий двигатель постоянного тока обычно используется из-за его наилучшего регулирования скорости. Также, следовательно, как обмотка якоря, так и обмотки возбуждения находятся под одним и тем же напряжением питания, однако существуют дискретные ветви для потока тока якоря и тока возбуждения.
Параллельный двигатель имеет несколько отличительных рабочих характеристик от серийного двигателя. Поскольку катушка шунтирующего возбуждения сделана из тонкой проволоки, она не может производить большой ток для запуска, как последовательное поле. Это означает, что параллельный двигатель имеет чрезвычайно низкий пусковой крутящий момент, что требует, чтобы нагрузка на вал была довольно небольшой.

Шунтирующий двигатель
Когда на шунтирующий двигатель подается напряжение, через шунтирующую катушку протекает очень слабый ток. Якорь шунтирующего двигателя аналогичен серийному двигателю, и он потребляет ток для создания сильного магнитного поля. Из-за взаимодействия магнитного поля вокруг якоря и поля, создаваемого вокруг шунтирующего поля, двигатель начинает вращаться.
Как и в серийном двигателе, когда якорь начинает вращаться, он производит обратную ЭДС. Обратная ЭДС приведет к тому, что ток в якоре начнет уменьшаться до очень небольшого уровня. Величина тока, потребляемого якорем, напрямую зависит от размера нагрузки, когда двигатель достигает полной скорости. Поскольку нагрузка обычно мала, ток якоря будет небольшим.
Преимущества
К преимуществам параллельного двигателя можно отнести следующее.
- Простое управление, обеспечивающее высокий уровень гибкости для решения сложных проблем привода
- Высокая доступность, поэтому требуется минимальное обслуживание
- Высокий уровень электромагнитной совместимости
- Очень плавный ход, поэтому низкая механическая нагрузка на всю систему и высокие динамические процессы управления
- Широкий диапазон регулирования и низкие скорости, поэтому универсальное применение
Приложения
Шунтовые двигатели постоянного тока очень подходят для систем с ременным приводом. Этот двигатель постоянной скорости используется в промышленных и автомобильных приложениях, таких как станки и намоточные / разматывающие машины, где требуется высокая точность крутящего момента.
Составные двигатели постоянного тока
Составные двигатели постоянного тока включают в себя шунтирующее поле с независимым возбуждением, которое имеет отличный пусковой крутящий момент, однако при использовании с регулируемой скоростью возникают проблемы. Поле в этих двигателях может быть подключено последовательно через якорь, а также через шунтирующее поле, которое возбуждается отдельно. Последовательное поле обеспечивает превосходный пусковой момент, тогда как шунтирующее поле обеспечивает улучшенное регулирование скорости. Но последовательное поле вызывает проблемы с управлением в приводах с регулируемой скоростью и обычно не используется в 4-квадрантных приводах.
Отдельно возбужденный
Как следует из названия, в противном случае обмотки возбуждения питаются от отдельного источника постоянного тока. Уникальность этих двигателей заключается в том, что ток якоря не проходит через обмотки возбуждения, поскольку обмотка возбуждения усилена отдельным внешним источником постоянного тока. Уравнение крутящего момента двигателя постоянного тока: Tg = Ka φ Ia. В этом случае крутящий момент изменяется посредством изменения магнитного потока поля «φ» & независимо от тока якоря «Ia».
Самовозбужденный
Как следует из названия, в этом типе двигателя ток в обмотках может подаваться через двигатель, в противном случае - через саму машину. Кроме того, этот двигатель разделен на двигатель с последовательной обмоткой и двигатель с параллельной обмоткой.
Двигатель постоянного тока с постоянным магнитом
Двигатель постоянного тока с постоянным магнитом или постоянным магнитом имеет обмотку якоря. Эти двигатели сконструированы с постоянными магнитами, размещенными на внутренней стороне сердечника статора для генерации магнитного потока. С другой стороны, ротор включает в себя обычный якорь постоянного тока, включая щетки и сегменты коммутатора.
В двигателе постоянного тока с постоянными магнитами магнитное поле может быть сформировано с помощью постоянного магнита. Таким образом, входной ток не используется для возбуждения, которое используется в кондиционерах, дворниках, автомобильных стартерах и т. Д.
Подключение двигателя постоянного тока к микроконтроллеру
Микроконтроллеры не могут управлять двигателями напрямую. Итак, нам нужен какой-то драйвер для управления скоростью и направлением двигателей. Драйверы двигателей будут действовать как устройства взаимодействия между микроконтроллеры и моторы . Драйверы двигателей будут действовать как усилители тока, поскольку они принимают управляющий сигнал низкого тока и выдают сигнал высокого тока. Этот сильноточный сигнал используется для привода двигателей. Использование микросхемы L293D - простой способ управления двигателем с помощью микроконтроллера. Он содержит внутри две схемы драйвера H-моста.
Эта микросхема предназначена для управления двумя моторами. L293D имеет два набора устройств, где 1 набор имеет вход 1, вход 2, выход 1, выход 2 с контактом включения, а другой набор имеет вход 3, вход 4, выход 3, выход 4 с другим контактом разрешения. Вот видео, связанное с L293D
Вот пример двигателя постоянного тока, который связан с микроконтроллером L293D.

Двигатель постоянного тока с микроконтроллером L293D
L293D имеет два набора конфигураций, где один набор имеет вход 1, вход 2, выход 1 и выход 2, а другой набор имеет вход 3, вход 4, выход 3 и выход 4, согласно приведенной выше диаграмме,
- Если контакты 2 и 7 высокие, то контакты 3 и 6 также высокие. Если разрешение 1 и штифт 2 высокие, а штифт 7 низкий, то двигатель вращается в прямом направлении.
- Если разрешение 1 и штифт 7 высокие, а штифт 2 низкий, то двигатель вращается в обратном направлении.
Сегодня двигатели постоянного тока все еще используются во многих сферах применения, таких как игрушки и дисководы, или в больших размерах для работы сталепрокатных станов и бумагоделательных машин.
Уравнения двигателя постоянного тока
Величина испытываемого потока составляет
F = BlI
Где, B - плотность потока, создаваемого обмотками возбуждения.
l- Активная длина проводника
I-ток, проходящий через проводник
При вращении проводника индуцируется ЭДС, которая действует в направлении, противоположном подаваемому напряжению. Это дается как

Где, Ø- Fluz из-за обмоток возбуждения
P- Количество полюсов
Константа А-А
N - Скорость двигателя
Z- Количество проводников
Напряжение питания, V = Eб+ Якрк
Развиваемый крутящий момент составляет
 Таким образом, крутящий момент прямо пропорционален току якоря.
Таким образом, крутящий момент прямо пропорционален току якоря.
Кроме того, скорость зависит от тока якоря, следовательно, крутящий момент и скорость двигателя косвенно зависят друг от друга.
Для параллельного двигателя постоянного тока скорость остается почти постоянной, даже если крутящий момент увеличивается от холостого хода до полной нагрузки.
Для двигателя постоянного тока скорость уменьшается по мере увеличения крутящего момента от холостого хода до полной нагрузки.
Таким образом, крутящим моментом можно управлять, изменяя скорость. Регулировка скорости достигается либо
- Изменение магнитного потока путем управления током через обмотку возбуждения - метод управления потоком. С помощью этого метода скорость регулируется выше номинальной.
- Контроль напряжения якоря - Обеспечивает регулирование скорости ниже нормальной.
- Контроль напряжения питания - обеспечивает контроль скорости в обоих направлениях.
4-х квадрантная работа
Как правило, двигатель может работать в 4 различных регионах. В четырехквадрантный режим двигателя постоянного тока включает следующее.
- Как двигатель в прямом или по часовой стрелке.
- Как генератор в прямом направлении.
- Как двигатель в обратном или против часовой стрелки.
- Как генератор в обратном направлении.

4-квадрантная работа двигателя постоянного тока
- В первом квадранте двигатель перемещает нагрузку со скоростью и крутящим моментом в положительном направлении.
- Во втором квадранте направление крутящего момента меняется на противоположное, и двигатель действует как генератор.
- В третьем квадранте двигатель перемещает нагрузку со скоростью и крутящим моментом в отрицательном направлении.
- В 4thквадрант, двигатель работает как генератор в реверсивном режиме.
- В первом и третьем квадранте двигатель действует как в прямом, так и в обратном направлении. Например, двигатели в кранах, чтобы поднимать груз, а также опускать его.
Во втором и четвертом квадранте двигатель действует как генератор в прямом и обратном направлениях соответственно и возвращает энергию источнику питания. Таким образом, способ управления работой двигателя, чтобы заставить его работать в любом из 4-х квадрантов, заключается в управлении его скоростью и направлением вращения.
Скорость регулируется либо изменением напряжения якоря, либо ослаблением поля. Направление крутящего момента или направление вращения регулируется путем изменения степени, в которой приложенное напряжение больше или меньше обратной ЭДС.
Распространенные неисправности в двигателях постоянного тока
Важно знать, а также понимать отказы и неисправности двигателя, чтобы описать наиболее подходящие устройства безопасности для каждого случая. Существует три типа отказов двигателя: механические, электрические и механические, которые перерастают в электрические. К наиболее частым сбоям относятся следующие:
- Пробой изоляции
- Перегрев
- Перегрузки
- Выход из строя подшипника
- Вибрация
- Заторможенный ротор
- Несоосность вала
- Обратный бег
- Несбалансированность фаз
К наиболее распространенным неисправностям, возникающим в двигателях переменного тока и двигателей постоянного тока, относятся следующие.
- Когда двигатель установлен неправильно
- Когда мотор забит грязью
- Когда в двигателе есть вода
- Когда мотор перегревается
Двигатель 12 В постоянного тока
Двигатель постоянного тока 12 В - недорогой, компактный и мощный, который используется в нескольких приложениях. Выбор подходящего двигателя постоянного тока для конкретного применения - сложная задача, поэтому очень важно работать с конкретной компанией. Лучшим примером этих двигателей является METMotors, поскольку они производят высококачественные двигатели PMDC (постоянный магнит постоянного тока) уже более 45 лет.
Как выбрать правильный мотор?
Выбор двигателя 12 В постоянного тока может быть сделан очень легко с помощью METmotors, потому что профессионалы этой компании сначала изучат ваше правильное применение, а затем рассмотрят многочисленные характеристики, а также спецификации, чтобы гарантировать, что вы получите наилучший продукт.
Рабочее напряжение - одна из характеристик этого двигателя.
Когда двигатель приводится в действие от батарей, обычно выбираются низкие рабочие напряжения, поскольку для получения определенного напряжения требуется меньшее количество ячеек. Но при высоких напряжениях двигатель постоянного тока обычно более эффективен. Несмотря на то, что его работа достижима при напряжении 1,5 В до 100 В. Наиболее часто используемые двигатели - 6v, 12v и 24v. Другие основные характеристики этого двигателя - скорость, рабочий ток, мощность и крутящий момент.
Двигатели 12 В постоянного тока идеально подходят для различных применений благодаря источнику постоянного тока, требующему рабочего крутящего момента, а также высокого пускового момента. Эти двигатели работают на меньших скоростях по сравнению с двигателями с другими напряжениями.
Характеристики этого двигателя в основном различаются в зависимости от компании-производителя, а также области применения.
- Скорость двигателя от 350 до 5000 об / мин.
- Номинальный крутящий момент этого двигателя составляет от 1,1 до 12,0 фунт-дюймов.
- Выходная мощность этого мотора составляет от 01 до 21 л.с.
- Размеры рамы 60мм, 80мм, 108 мм.
- Сменные щетки
- Типичный срок службы кисти составляет 2000+ часов.
Обратная ЭДС в двигателе постоянного тока
Как только проводник с током помещен в магнитное поле, крутящий момент будет индуцироваться по проводнику, и крутящий момент будет вращать проводник, который рассекает поток магнитного поля. Основываясь на явлении электромагнитной индукции, когда проводник разрезает магнитное поле, внутри проводника возникает ЭДС.
Направление индуцированной ЭДС можно определить с помощью правила правой руки Флемминга. Согласно этому правилу, если мы сжимаем большой палец, указательный и центральный палец под углом 90 °, после этого указательный палец будет обозначать направление магнитного поля. Здесь большой палец представляет собой путь движения проводника, а средний палец обозначает ЭДС, наведенную на проводник.
Применяя правило правой руки Флемминга, мы можем заметить, что направление индуцированной ЭДС противоположно приложенному напряжению. Таким образом, ЭДС называется обратной или встречной ЭДС. Развитие обратной ЭДС может происходить последовательно за счет приложенного напряжения, но в обратном направлении, то есть обратная ЭДС сопротивляется протеканию тока, который ее вызывает.
Величину обратной ЭДС можно выразить аналогичным выражением, как показано ниже.
Eb = NP ϕZ / 60A
Где
«Eb» - это ЭДС, наведенная двигателем, которая называется обратной ЭДС.
«А» - это нет. параллельных дорожек по всей арматуре среди щеток обратной полярности
«П» - это нет. полюсов
«N» - скорость
«Z» - это полное количество проводников внутри якоря.
‘Φ’ - полезный поток для каждого полюса.
В приведенной выше схеме величина обратной ЭДС всегда мала по сравнению с приложенным напряжением. Несоответствие между ними почти равнозначно, если двигатель постоянного тока работает в обычных условиях. Ток будет индуцироваться в двигателе постоянного тока из-за основного источника питания. Соотношение между основным питанием, противо-ЭДС и током якоря можно выразить как Eb = V - IaRa.
Приложение для управления работой двигателя постоянного тока в 4 квадрантах
Управление работой двигателя постоянного тока в 4-х квадрантах может быть достигнуто с помощью микроконтроллера, сопряженного с 7 переключателями.

4-х квадрантный контроль
Случай 1: При нажатии переключателя пуска и по часовой стрелке логика микроконтроллера выдает низкий логический уровень на контакт 7 и высокий логический уровень на контакт 2, заставляя двигатель вращаться по часовой стрелке и работать в режиме 1.улквадрант. Скорость двигателя можно изменять, нажимая переключатель PWM, вызывая приложение импульсов различной длительности к разрешающему выводу микросхемы драйвера, таким образом изменяя приложенное напряжение.
Случай 2: Когда передний тормоз нажат, логика микроконтроллера применяет низкий логический уровень к выводу 7 и высокий логический уровень к выводу 2, и двигатель стремится работать в обратном направлении, вызывая его немедленную остановку.
Подобным образом нажатие переключателя против часовой стрелки заставляет двигатель двигаться в обратном направлении, т.е.rdквадрант, и нажатие переключателя заднего тормоза приводит к мгновенной остановке двигателя.
Таким образом, посредством правильного программирования микроконтроллера и переключателей можно управлять работой двигателя в каждом направлении.
Таким образом, это все об обзоре двигателя постоянного тока. В преимущества двигателя постоянного тока обеспечивают ли они превосходный контроль скорости для ускорения и замедления, простую для понимания конструкцию и простую и дешевую конструкцию привода. Вот вам вопрос, каковы недостатки двигателя постоянного тока?
Фото:
- Бесщеточные двигатели постоянного тока news.softpedia
- 4-квадрантная работа двигателя постоянного тока lh5.ggpht
- Редукторный двигатель постоянного тока от Викимедиа
- Shunt Motor - пользователем зона














{kind=link}
{kind=link}
{kind=link}
{kind=link}