В этом посте мы исследуем, что такое двигатель BLDC, а затем узнаем о конструкции бессенсорной схемы драйвера двигателя BLDC.
Вентиляторы ЦП BLDC
Видели эти быстродействующие вентиляторы в процессорах, стабилизаторах напряжения, DVD-плеерах и другом подобном оборудовании, которые работают с максимальной эффективностью, потребляют минимум места, тока и, тем не менее, способны выполнять важные операции в соответствии с требованиями конкретного оборудования?
Да, это все современные версии вентиляторов BLDC или бесщеточных двигателей постоянного тока, которые намного лучше старых традиционных щеточных двигателей.

Изображение предоставлено: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Однако для двигателя BLDC потребуется сложная схема драйвера, и да, все эти вентиляторы процессора содержат эти встроенные драйверные модули, хотя они кажутся легко управляемыми с помощью обычного постоянного тока, внутренне система уже оснащена интеллектуальной схемой.
Драйвер двигателя BLDC
Здесь мы узнаем об одной такой интеллектуальной схеме драйвера двигателя BLDC, использующей одну микросхему DRV10963 для управления любым маленьким двигателем BLDC с невероятной эффективностью, а позже в одной из следующих статей мы увидим, как эту схему IC можно модернизировать даже для вождения. мощные сильноточные BLDC, такие как те, которые используется в квадрокоптерах.
Но перед этим было бы интересно узнать немного о двигателях BLDC.
Разница между щеточными и бесщеточными двигателями постоянного тока
Разница между щеточным двигателем и бесщеточным двигателем и степенью эффективности довольно очевидна.
Поскольку щеточные двигатели имеют намотанный якорь, движущийся между магнитами, необходимо использовать `` щетки '' (трущиеся контакты), чтобы клеммы подвижной катушки могли постоянно получать напряжение питания, не достигая самого источника питания, что в противном случае привело бы к работа невозможна и подвергает опасности операции.
В бесщеточном двигателе катушка или обмотка никогда не движутся и являются постоянными, здесь ротор несет набор постоянных магнитов и вращается под влиянием магнитных потоков окружающей обмотки.
Поскольку магнит избавлен от всех проблем и может работать без использования терминалов для управления или приема энергии, он может работать без усилий, вращаясь с высокой скоростью и практически бесшумно.
Но здесь есть одна загвоздка. Чтобы электромагнит реагировал на потоки постоянного магнита, должен быть постоянный сдвиг магнитной фазы или полюсов, чтобы два аналога могли постоянно реагировать и проходить через противоположную силу, тем самым высвобождая требуемую крутящую силу над ротор и выполнить вращение с результирующим крутящим моментом.
В щеточном двигателе это становится проще из-за саморегулирующейся природы катушки якоря, которая может вращаться и создавать самоподдерживающуюся противодействующую магнитную силу и продолжать вращаться без необходимости каких-либо внешних импульсов или обработки.
Однако в BLDC это становится проблемой, поскольку магнитный ротор остается «невежественным» и требует расчетной магнитной команды от обмотки, чтобы вращаться осмысленным образом, а не случайным образом.
Именно поэтому все двигатели BLDC в обязательном порядке требуют схемы драйвера двигателя для управления тремя различными наборами обмоток внутри двигателя.
Таким образом, все BLDC являются по существу трехфазными двигателями и обязательно требуют трех фаз для создания крутящего момента на роторе.
Для чего нужны бессенсорные драйверы BLDC
Схема драйвера BLDC без датчика просто электризует 3 набора обмоток последовательным образом, так что магнитный ротор может выдерживать постоянную противодействующую силу, позволяющую двигателю достигать постоянного крутящего момента и вращательной силы.
Но это последовательное включение обмотки BLDC схемой не может быть просто случайно установлено, оно должно быть в тандеме или в ответ на вращательное положение магнита ротора, иначе реализация может пойти не так, и мы можем наблюдать вал двигателя (ротор ), вращающийся беспорядочно, то есть рывки между вращением по часовой стрелке и против часовой стрелки без заметного вращения.
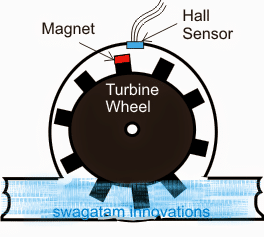
Почему датчики используются в двигателях BLDC
Поэтому мы вводим датчики, расположенные внутри многих вариантов двигателей BLDC, эти датчики (обычно датчики на эффекте Холла) «понимают» изменяющееся положение магнитных полюсов магнита ротора, инструктируют подключенную схему процессора для электризации соответствующей обмотки и выполнения вращательного движения. с оптимальным крутящим моментом.
Датчики на эффекте Холла эффективно используются в большинстве двигателей BLDC, которые относительно больше по размеру, но для двигателей меньшего размера, таких как вентиляторы ЦП, приводы ЦП, DVD-плееры, в небольших вытяжных вентиляторах, для двигателей, используемых в квадрокоптерах, датчики на эффекте Холла могут не подходить. и поэтому реализуется альтернативный подход без датчика.
Это включает использование собственного электричества обратной ЭДС обмотки, которое используется в качестве эталонного источника для обработки и электрификации соответствующих наборов обмоток и реализации крутящего момента.

Имитация движения ротора BLDC
В приведенном выше примерном моделировании мы можем визуализировать, как высвободившаяся обратная ЭДС берется за эталон и используется для создания импульсов последовательности для последующих наборов обмоток, создавая вращающий момент на центральном роторе с постоянными магнитами. Симуляция может не быть точной копией, тем не менее, она дает общее представление о принципе работы.
Интересно отметить, что импульс переключается, когда N / S магнита находится точно в центре сердечника обмотки, что позволяет обмотке активировать либо N, либо S в зависимости от полярности импульса и создавать притягивающее и отталкивающее усилие на магниты N / S, создавая необходимый крутящий момент на максимально возможном уровне.
А это, в свою очередь, становится возможным благодаря обратной ЭДС, высвобождаемой при переключении предыдущей обмотки.
Вышеупомянутое обсуждение поясняет работу двигателя без датчика BLDC, теперь давайте узнаем, как указанная схема обрабатывает вышеуказанное сложное выполнение трехфазного переключения.
Драйвер BLDC DRV10963
После некоторого поиска в Google я обнаружил, что эта бессенсорная схема драйвера BLDC, использующая один чип DRV10963, который использует незначительное количество деталей в конфигурации и, тем не менее, может реализовать сложную обработку для предполагаемых действий.
DRV10963 - это современная микросхема, специально разработанная для управления двигателями без датчика BLDC путем простого прогнозирования обратной ЭДС от обмотки двигателя и передачи точной команды на обмотку и достижения оптимального крутящего момента на роторе.
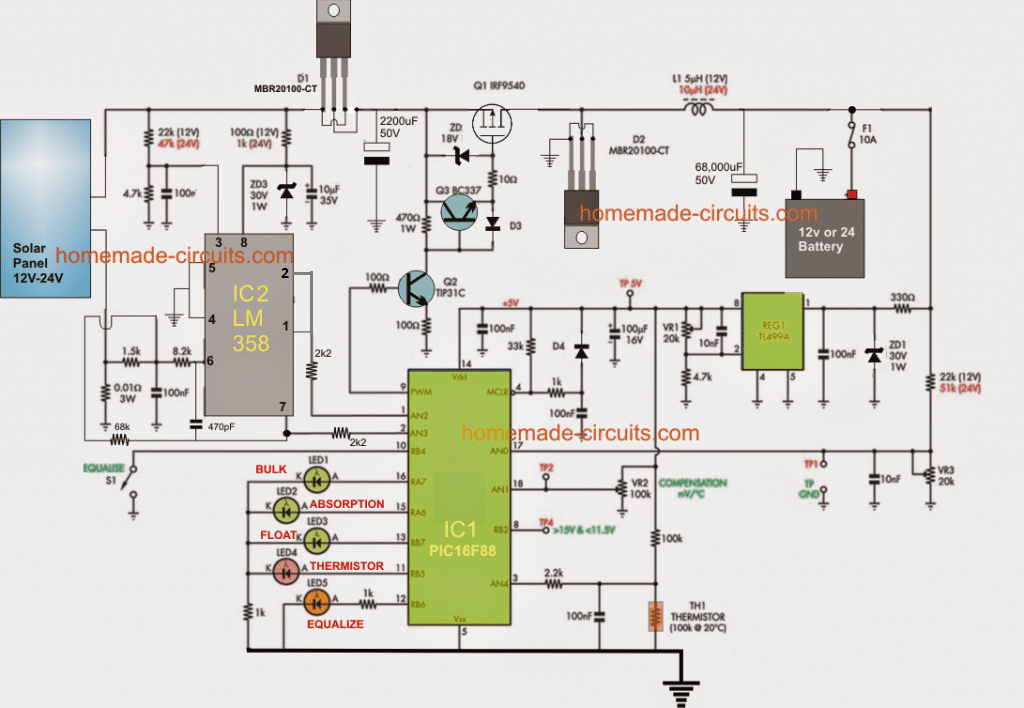
Принципиальная электрическая схема

На изображении выше показана простая схема схемы, которая, по-видимому, не включает ничего, кроме самой микросхемы.
Различные распиновки предназначены для выполнения указанных функций, таких как ШИМ-регулирование скорости двигателя, управление направлением и т. Д., Путем простой подачи в соответствующие распиновки указанных данных из внешнего источника.
На следующем изображении показан корпус микросхемы, который выглядит как 10-контактная микросхема DIL, различные функции ее вывода можно изучить на основе данных, представленных на диаграмме:

Обратимся к принципиальной схеме предложенной схемы бездатчикового драйвера BLDC. Как показано в предыдущей статье, а также на изображении микросхемы выше, детали распиновки можно понять следующим образом:
Сведения о распиновке IC
FG = Это вывод индикатора скорости двигателя (выход), который настроен в режиме открытого коллектора с внутренним BJT.
Открытый коллектор означает, что выход в этой распиновке будет производить отрицательные ШИМ через понижающую логику через открытый коллектор и землю, таким образом, чтобы получить действительное показание, пользователю необходимо будет подключить подтягивающий резистор через этот открытый коллектор и положительное питание (5 В ) для выполнения индикации скорости на этой распиновке.
FGS = Это вход переключателя индикатора скорости, что означает, что здесь может быть введен высокий или низкий логический уровень для включения / выключения контакта индикатора FG.
Vcc = положительное напряжение питания микросхемы для обеспечения ее работы, не должно превышать 5 В.
W, U и V - это трехфазные выходы для двигателя BLDC, который должен работать через эту ИС. Это также действует как входы для измерения импульсов ЭДС двигателя для требуемого синхронного переключения катушек двигателя.
GND = Относится к отрицательной выводе питания IC по отношению к выводу Vdd.
FR = Помогает выбрать или управлять направлением двигателя и может быть динамически изменен в любое время после подачи питания на систему, просто путем введения внешнего логического уровня высокого или низкого уровня.
PWM = это означает, что вход управления PWM от внешний генератор сигналов ШИМ.
Этот вход ШИМ может изменяться для реализации желаемого управления скоростью подключенного двигателя BLDC.
Пунктирное пространство в центре чипа указывает на термопрокладку, которая может быть зажата или прижата радиатором, чтобы отвести возможное тепловыделение на чипе, когда он используется с нагруженным двигателем BLDC.
Вышеупомянутое обсуждение описывает распиновку или детали подключения бессенсорной микросхемы драйвера двигателя BLDC DRV10963, теперь давайте подробно проанализируем внутреннюю конфигурацию и функционирование микросхемы с помощью следующих пунктов:
Описание устройства
DRV10963 - это трехфазный привод с электродвигателем без датчиков со встроенными силовыми полевыми МОП-транзисторами (3-фазный H-мостовой). Он разработан для повышения производительности, снижения шума и минимального количества вторичного материала. Эксклюзивная бессенсорная схема синусоидального управления 180 ° с окном без окна обеспечивает бесшумную эффективность коммутации двигателя.
DRV10963 состоит из функции интеллектуального обнаружения блокировки и дополнительных встроенных схем безопасности для обеспечения надежной работы. DRV10963 можно найти в термоэффективной 10-контактной упаковке USON с непокрытым термоматом.
Как работает IC
Изделие DRV10963 представляет собой трехфазный мотор-привод без датчиков со встроенными силовыми МОП-транзисторами.
Создан специально для обеспечения превосходных характеристик, снижения резонанса и минимального количества поверхностных деталей.
Основная схема бессенсорного безоконного синусоидального управления на 180 ° обеспечивает бесшумную работу двигателя за счет поддержания номинальной электрически стимулированной пульсации крутящего момента. После инициализации устройство DRV10963 будет вращать двигатель в направлении, указанном через входной контакт FR.
Микросхема DRV10963 будет работать с трехфазным двигателем постоянного тока постоянного тока с использованием синусоидальной схемы управления.
Значение используемых синусоидальных фазных напряжений зависит от рабочего цикла вывода ШИМ. Пока двигатель движется, микросхема DRV10963 передает данные скорости на вывод FG.
Блок DRV10963 включает функцию интеллектуального распознавания блокировки. В случае, когда двигатель останавливается из-за постороннего давления, программа обнаружит проблему блокировки и примет меры по ее устранению самостоятельно вместе с двигателем.
Конкретная процедура схемы определения блокировки подробно описана в разделе Обнаружение блокировки. Кроме того, микросхема DRV10963 включает в себя несколько встроенных схем безопасности, например защиту от перегрузки по току, защиту от перенапряжения, защиту от пониженного напряжения и защиту от перегрева.
Характеристика Объяснение
Ввод скорости и управление
DRV10963 имеет 3-фазные выходы PWM 25-kl-lz, которые могут иметь стандартный процент синусоидальных сигналов от фазы к фазе. В случае, если какой-либо цикл определяется относительно земли, обнаруженная форма сигнала, вероятно, будет синусоидой с защитой ШИМ в сочетании с гармониками 3-го порядка, как показано на рисунке 2.

Эта стратегия кодирования оптимизирует спецификации драйвера по той причине, что, вероятно, часто будет одна фаза на выходе, которая может быть на одном уровне с нулем.
Итоговая амплитуда изменяется в соответствии с напряжением питания (VCC) и обязательным рабочим циклом ШИМ (PWM), как определено в уравнении 1 и выделено на рисунке 3. Оптимальная амплитуда реализуется, когда проинструктированный рабочий цикл ШИМ составляет 100 ПРОЦЕНТОВ.
Vphpk = PWMdc>

Скорость двигателя регулируется не напрямую с помощью команды ШИМ для регулирования амплитуды фазных напряжений, которые используются для двигателя.
Рабочий цикл входа ШИМ преобразован в 9-битную цифровую величину (от 0 до 511).
Разрешение регулирования составляет 1/512 == 0,2%. Анализатор рабочего цикла облегчает операцию обмена начальным порядком между входным рабочим циклом и 9-битным цифровым числом.
Это показано на рисунке 4, где r = 80 мс.

Производительность обмена между заказанным рабочим циклом ШИМ и максимальной выходной амплитудой в устройстве DRV10963 является переменной.
Максимальная амплитуда результата обсуждается уравнением 1, когда команда ШИМ> минимального рабочего цикла. Самый низкий рабочий цикл часто устанавливается равным 13%, 10%, 5% или без ограничения настройкой OTP (MINOP_DC1: 0).
В таблице 1 показаны рекомендуемые конфигурации для минимального рабочего цикла.
Когда рабочий цикл, заданный ШИМ, меньше минимального рабочего цикла и больше 1,5%, выход будет регулироваться с минимальным рабочим циклом. Каждый раз, когда рабочий цикл входа составляет менее 1,5%, устройство DRV10963, скорее всего, не будет запускать выход и перейдет в режим ожидания.
Это можно проиллюстрировать на рисунке 6.

Ротационные конфигурации
DRV10963 запустит двигатель с помощью техники, подробно описанной на Рисунке 7.

График инициализации двигателя состоит из конфигурируемых устройством альтернатив для предела переключения разомкнутого контура на замкнутый контур (HOW.), Времени выравнивания (TAHQH) и скорости ускорения (RACE).
Для согласования ротора с логикой коммутации DRV10963 выполняет рабочий цикл x% на фазах V и W, одновременно управляя фазой U на GND.
Этот сценарий поддерживается в течение TAIign секунд. Значение x% определяется напряжением VCC (как показано в таблице 2), чтобы поддерживать достаточный крутящий момент при различных напряжениях питания.
По завершении последовательности выравнивания двигатель принудительно ускоряется за счет подачи синусоидальных фазных напряжений с пиковыми уровнями, как показано в таблице 2, и повышения посредством диапазона коммутации с увеличивающейся скоростью, представленной RACE, до тех пор, пока уровень коммутации не вырастет до Hom. ., Гц.
Как только этот предел будет достигнут, DRV ’l0963 перейдет в режим замкнутого контура, в котором последовательность коммутации распознается встроенным алгоритмом управления, а используемое напряжение определяется входом обязательного рабочего цикла ШИМ.
Предел переключения разомкнутого контура на замкнутый контур (Hom), время выравнивания (TAHQH) и скорость ускорения (RACE) настраиваются с помощью конфигураций OTP.
Выбор порога передачи обслуживания (HOW,) обычно утверждается путем оценки методом проб и ошибок. Задача состояла в том, чтобы предпочесть допуск переключения, который мог бы быть как можно меньшим и позволял бы двигателю легко и точно переключаться между ускорением разомкнутого контура и ускорением замкнутого контура.
Обычно двигатели с повышенной скоростью (максимальная скорость) требуют более высокого допуска при переключении, поскольку двигатели с повышенной скоростью имеют пониженное Kt, следовательно, более доступный BEMF.
Таблица 3 демонстрирует конфигурируемые предпочтения для допуска передачи обслуживания. Доказано, что самая высокая скорость в электрических Гц может помочь в выборе желаемой скорости передачи обслуживания для конкретного представления.

Выбор времени выравнивания (TAHQH) и скорости ускорения (RACE) может даже зависеть от анализа методом проб и ошибок.
Двигатели с большей инерцией обычно требуют увеличенного времени наладки и более медленного ускорения в отличие от двигателей с низкой инерцией, которые обычно требуют более короткого времени наладки вместе с более быстрым процентом ускорения. Компромиссы программы должны быть реализованы, чтобы извлечь выгоду из стабильности запуска, а не период ротации.
TI рекомендует начинать с выбора менее интенсивных конфигураций (более медленный RACE и значительный Tmign), чтобы снизить время нарастания крутящего момента для поддержки максимальной скорости выполнения.
Как только будет подтверждено, что оборудование работает добросовестно, можно использовать дополнительные принудительные конфигурации (больший RACC и меньший TAHQH) для уменьшения момента включения и в то же время осторожного отслеживания скорости выполнения.
В таблице 4 показаны настраиваемые параметры TA'g ,, и RACE.

Оставшаяся часть объяснения этой бессенсорной ИС BLDC предоставляется в этой исходной таблице данных
Пожалуйста, не стесняйтесь комментировать, чтобы узнать больше о рассмотренных выше деталях схемы бессенсорного двигателя BLDC.
Предыдущая статья: Схема блока питания для рюкзака со светодиодной подсветкой 12 В Далее: Схема дистанционного управления квадрокоптером без MCU