
Обычно в роботах с дистанционным управлением используются радиочастотные схемы, которые имеют недостатки ограниченного рабочего диапазона, ограниченного управления и ограниченного частотного диапазона. Чтобы преодолеть эти недостатки, мобильный телефон управляемый лендровер используется роботизированный автомобиль. Он обеспечивает преимущества роботизированного управления, контроллеров без вторжений и до двенадцати систем управления и т. Д.
Хотя возможности и внешний вид встроенная робототехника сильно различаются, все роботы имеют общие черты подвижной механической конструкции под той или иной формой управления. Управление роботами включает три различных этапа: восприятие, обработку и действие. Обычно датчики устанавливаются на роботе. Восприятие и обработка осуществляется встроенным микроконтроллером, а действие выполняется с помощью двигателей.
Роботизированный автомобиль Land Rover с сотовым телефоном

Роботизированный автомобиль Land Rover с мобильным телефоном от Edgefxkits.com
Основная цель этого проекта - управлять роботизированной рукой, установленной на роботизированном транспортном средстве, с помощью мобильного телефона. Он обеспечивает большой рабочий диапазон, надежное управление и т. Д.
Блок-схема роботизированного автомобиля Land Rover, управляемого мобильным телефоном:

Блок-схема мобильного телефона Land Rover
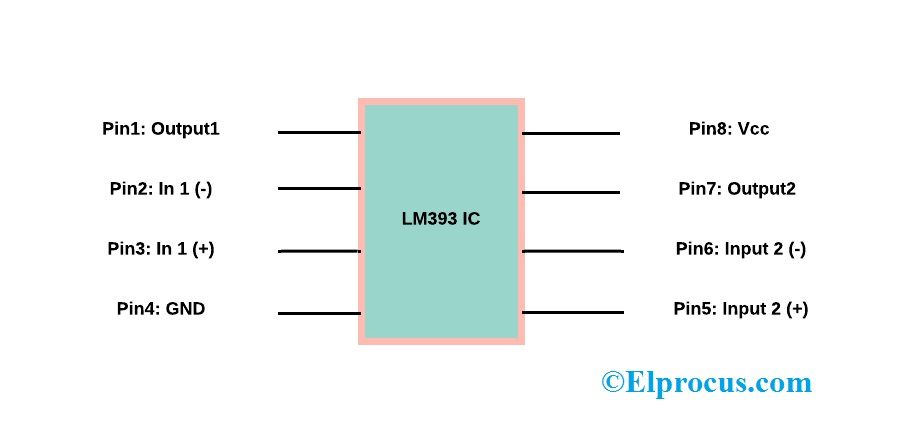
Основными строительными блоками являются микроконтроллер, мобильный телефон, декодер DTMF и схема драйвера двигателя постоянного тока. Мобильный телефон - самая важная часть всей системы, потому что вся система работает и активируется мобильным телефоном. DTMF (двухтональный многочастотный) принимает входной сигнал от сотового телефона и декодирует его, а затем генерирует 4-битный цифровой выход 8051 микроконтроллер . Когда декодер DTMF выдает цифровой выход, он также каждый раз генерирует прерывание.
Микроконтроллер - это сердце всей системы, поскольку он выполняет все управляющие действия. Микроконтроллер зависит от кода, который генерируется декодером DTMF для перемещения ровера вправо или влево, вперед или назад, вращая оба двигателя постоянного тока. Драйвер двигателя постоянного тока получает управляющие сигналы от микроконтроллера с низким или высоким логическим уровнем, затем он усиливает и вращает два двигателя в обоих направлениях.
Управление роботом включает в себя четыре основных этапа: восприятие, обработку действий и обнаружение. На этапе восприятия, если мобильный телефон, подключенный к роботу, принимает вызов, то нажатие клавиши на мобильном телефоне декодирует сгенерированный тон DTMF. Затем микросхема декодера принимает аудиосигнал от мобильного телефона, а затем преобразует тон DTMF в двоичный код, который затем подается на микроконтроллер. В этом проекте в качестве декодера DTMF используется микросхема MT88710. На этапе обработки микроконтроллер обрабатывает двоичный код, полученный от декодера DTMF. В Микроконтроллер предварительно запрограммирован на «C» для выполнения этой конкретной задачи в соответствии с входными битами.
На этапе действия вращение двигателей зависит от входного сигнала, подаваемого микроконтроллером. В вездеходе используются два двигателя постоянного тока с частотой вращения 30 об / мин, приводимые в движение микросхемой привода двигателя. При обнаружении сцены и обнаружении препятствий инфракрасный передатчик и приемник используются вместе с зуммером. Когда препятствие оказывается перед роботом, ИК-передатчик передает ИК-лучи на объект, а затем объект отражает ИК-лучи на ИК-приемник. Затем ИК-приемник принимает ИК-лучи, чтобы активировать зуммер.
Принципиальная схема роботизированного автомобиля Land Rover, управляемого мобильным телефоном:
Основными компонентами этого робота-вездехода, управляемого мобильным телефоном, являются микроконтроллер, драйвер двигателя и декодер DTMF. В этом проекте используется декодер DTMF серии MT8870, который использует методы цифрового подсчета для обнаружения 16 пар тонов DTMF в выходном 4-битном коде. Встроенная схема набора номера исключает предварительную фильтрацию. Если на контакт 2 подается входной сигнал, то конфигурация входа считается действующей. 4-битный декодированный сигнал DTMF-тона передается на вывод 11 через выход вывода 14. Эти выводы подключены к выводам микроконтроллера Pao, Pa1, Pa2 и Pa3. Выход микроконтроллера с контактов порта PD0 - PD3 и PD7 подается на входы IN1, IN4 и позволяет контактам EN1, EN2 микросхемы L293D драйвера двигателя управлять двумя двигателями постоянного тока .

Принципиальная схема мобильного телефона Land Rover
В этой схеме переключатель S1 используется для ручного сброса. Выхода микроконтроллера недостаточно для управления двигателями постоянного тока, поэтому для вращения двигателя необходимы драйверы тока. Драйвер двигателя L293D разработан для обеспечения двунаправленных приводных токов до 600 мА при напряжении от 4,5 В до 36 В, что делает его легче управлять двигателями постоянного тока. Драйвер двигателя L293D состоит из четырех драйверов. Контакты IN1 - IN4 и OUT1 и OUT4 являются входными и выходными контактами драйвера 1 - драйвера 4. Драйверы 1, 2, 3 и 4 активируются контактом разрешения 1 (EN1) и контактом 9 (EN2). Когда на разрешающем входе EN1 (контакт 1) высокий уровень, драйверы 1 и 2 включены. Точно так же вход разрешения EN2 (вывод 9) включает драйверы 3.
Преимущества и недостатки:
К преимуществам роботизированного вездехода, управляемого мобильным телефоном, относятся беспроводная система управления и наблюдения, автомобильная навигация на основе технологии 3G и неограниченный рабочий диапазон на основе сети мобильного телефона. К недостаткам можно отнести: стоимость мобильного телефона высокая. разряд мобильных аккумуляторов : проблема разрядки, связанная с батареями, поскольку они теряют заряд из-за быстрой разрядки из-за высокой адаптируемости нагрузки: система не адаптируется ко всем мобильным телефонам, но можно использовать только те, к которым подключена гарнитура
Таким образом, этот проект робота, управляемого мобильным телефоном, очень полезен в военных приложениях для управления военной техникой с помощью мобильного телефона. В будущем мы сможем определять положение врагов, установив беспроводная камера к роботизированному автомобилю Land Rover. Этот проект также может быть полезен для ученых, поскольку студенты могут изучать различные термины и принципы, предложенные в этом проекте. Этот проект поможет студентам добавить свои новаторские мысли и идеи в разрабатывать проекты робототехники .
Фото:
- Сотовый телефон под управлением Land Rover от Сантошбанисетти
- Принципиальная схема мобильного телефона Land Rover от инженер гараж








{kind=link}