Когда мы слышим слово «операционная система», в первую очередь приходит в голову, что операционная система, используемая в ноутбуках и компьютерах. Как правило, мы используем разные типы операционных систем, такие как Windows XP, Linux, Ubuntu, Windows 7,8.8.1 и 10. В смартфонах операционные системы такие как KitKat, Jellybean, marshmallow и Nougat. В цифровом электронном устройстве есть операционная система, разработанная программа микроконтроллера . Есть разные типы операционных систем для разработки микроконтроллера, но здесь мы обсудили операционную систему реального времени.
Что такое операционная система реального времени?
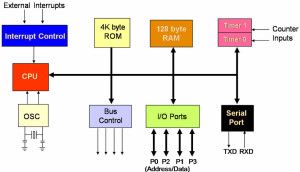
RTOS - это операционная система, это мозг системы реального времени и ее немедленная реакция на ввод. В ОСРВ задача будет завершена к указанному времени и будет предсказуемо реагировать на непредсказуемые события. Структура ОСРВ показана ниже.

Структура RTOS
Типы ОСРВ
Существует три различных типа ОСРВ, следующие:
- Программная операционная система реального времени
- Операционная система жесткого реального времени
- Фирменная операционная система реального времени

Типы ОСРВ
Программная операционная система реального времени
Операционная система мягкого реального времени имеет определенные крайние сроки, которые могут быть пропущены, и они предпримут действия в момент времени t = 0 +. Операционная система мягкого реального времени является разновидностью ОС и не содержит строгих правил. Критическое время этой операционной системы в некоторой степени затягивается. Примерами этой операционной системы являются цифровая камера, мобильные телефоны, онлайн-данные и т. Д.

Программная операционная система реального времени
Операционная система жесткого реального времени
Это тоже разновидность ОС и на нее предсказывают крайний срок. Прогнозируемые крайние сроки будут реагировать в момент времени t = 0. Некоторые примеры этой операционной системы - управление подушками безопасности в автомобилях, антиблокировочная тормозная система, система управления двигателем и т. Д.
Фирменная операционная система реального времени
В реальном времени у операционной системы есть определенные временные ограничения, они не строгие и могут вызывать нежелательные эффекты. Примеры этой операционной системы - визуальный контроль в промышленной автоматизации.
Работа с операционной системой реального времени
Существуют различные типы основных функций ОСРВ:
- Планировщик на основе приоритета
- Процедура прерывания системных часов
- Детерминированное поведение
- Синхронизация и обмен сообщениями
- Служба ОСРВ
Планировщик на основе приоритета
В планировщике на основе приоритетов большая часть RTOS имеет от 32 до 256 возможных приоритетов для отдельных задач или процессов. Этот планировщик запустит процесс с наивысшим приоритетом. Если задача выполняется на ЦП, то выполняется следующая задача с наивысшим приоритетом и продолжает процессы.
В системе процесс с наивысшим приоритетом будет иметь ЦП.
- Он бежит, чтобы закрыть
- Если исходная задача вытесняется новой, то готовится процесс с высоким приоритетом.
Есть три состояния задач или процессов, которые как бы готовы к запуску, а другое заблокировано, и описание каждого состояния приведено ниже.
Готов для запуска
О готовности к запуску говорят, когда у процесса есть все ресурсы для запуска, но он не должен находиться в состоянии выполнения. Затем он называется готовым к запуску.
Бег
Если задача выполняется, считается, что она находится в рабочем состоянии.
Заблокировано
В этом состоянии, если у него недостаточно ресурсов для запуска, он переводится в заблокированное состояние.
Для планирования задачи модифицированы три метода, ниже приводится их описание.
Совместное планирование
В этом типе планирования задача будет выполняться до тех пор, пока выполнение не будет завершено.
Планирование циклического перебора
В этом планировании каждому процессу назначается фиксированный временной интервал, и процессу необходимо завершить свое выполнение, иначе задача потеряет свой поток и генерацию данных.
Упреждающее планирование
Упреждающее планирование включает в себя приоритетное распределение времени, зависящее от времени. Обычно используется 256 уровней приоритета, и каждая задача имеет уникальный уровень приоритета. Некоторые системы поддерживают более высокий уровень приоритета, а несколько задач имеют некоторые приоритеты.
Процедура прерывания системных часов
Для выполнения операции, чувствительной ко времени, ОСРВ предоставит своего рода системные часы. Если системные часы 1 мс, то вы должны выполнить задачу за 50 мс. Обычно есть API, который следует за вами, чтобы сказать: «Через 50 мс разбуди меня». Следовательно, задача будет находиться в спящем положении, пока ОСРВ не проснется. У нас есть два уведомления о том, что пробуждение не гарантирует, что оно запустится точно в это время, это зависит от приоритета, и если в настоящее время выполняется более высокий приоритет, он будет отложен.
Детерминированное поведение
ОСРВ продвигается очень долго, чтобы защитить: если вы выполнили 100 задач или 10 задач, она не имеет никакого значения в расстоянии до переключения контекста и определяет следующую задачу с наивысшим приоритетом. В первичной детерминированной области ОСРВ - это обработка прерывания, когда линия прерывания получает сигнал, ОСРВ немедленно выполняет действие правильной процедуры обслуживания прерывания, и прерывание обрабатывается без какой-либо задержки.
Мы должны сообщить, что разработчики проекта напишут ISR для аппаратного обеспечения. Раньше RTOS предоставляла ISR для последовательных портов, системных часов и может быть сетевым оборудованием, но если есть что-то специализированное, например, сигналы кардиостимулятора, исполнительные механизмы и т. Д., Они не являются частью RTOS.
Это все о грубых обобщениях, и в ОСРВ существует множество различных реализаций. Некоторые из ОСРВ работают по-другому, и приведенное выше описание подходит для большей части существующих ОСРВ.
Синхронизация и обмен сообщениями
Синхронизация и обмен сообщениями обеспечивают связь между задачей одной системы другой системе и следующими службами обмена сообщениями. Для синхронизации внутренних действий используется флаг события и для отправки текстовых сообщений, которые мы можем использовать в почтовом ящике, каналах и очередях сообщений. В областях общих данных используются семафоры.
- Семафоры
- Флаги событий
- Почтовые ящики
- Трубы
- Очереди сообщений
Сервис RTOS
Самая важная часть операционной системы - это ядро. Чтобы контролировать оборудование, задача должна быть снята, и ядро должно распределять ресурсы и управлять ими. Если задача не может постоянно привлекать внимание ЦП, значит, ядро предоставляет другие службы. Следующие
- Службы времени
- Услуги по обработке прерываний
- Услуги по управлению устройствами
- Сервисы управления памятью
- Услуги ввода-вывода
Преимущества RTOS
- Когда все ресурсы и устройства неактивны, ОСРВ обеспечивает максимальное потребление системы и большую производительность.
- Когда задача выполняется, нет никаких шансов получить ошибку, потому что RTOS не содержит ошибок.
- Распределение памяти - лучший способ управления в этом типе системы.
- В системе этого типа время переключения очень меньше.
- Из-за небольшого размера программы ОСРВ используется в Встроенная система нравится транспорт и прочее.
В этой статье мы обсудили, как будет работать операционная система реального времени. Надеюсь, прочитав это, вы получили некоторую основную информацию. Если у вас есть какие-либо вопросы относительно этой статьи или для реализации электротехнических проектов , пожалуйста, оставляйте комментарии в разделе ниже. Вот вам вопрос, каковы функции RTOS?