Микросхемы серии TSOP17XX представляют собой специальные инфракрасные сенсорные устройства, созданные для реагирования на определенный диапазон инфракрасных частот и преобразования его в электрический импульсный выходной сигнал. Таким образом, он обладает надежной невосприимчивостью к другим видам ИК-сигналов.
Из-за этой конкретной центральной или полосовой рабочей частоты TSOP17XX становится трудно использовать эти датчики для проектирования желаемых или настраиваемых схем дистанционного управления на основе частоты.
В этом посте мы попытаемся придумать идею, как разрешить этим датчикам работать с любой желаемой уникальной частотой, чтобы сделать схему полностью защищенной от дурака.
Основной принцип работы сенсорных модулей TSOP17XX
Если мы обратимся к паспорт ИК-датчика TSOP17XX мы обнаруживаем, что IC имеет некоторые важные инструкции по эксплуатации для обеспечения правильного и оптимального функционирования датчика в ответ на ИК-сигнал.
Чтобы обеспечить правильное функционирование датчика, ИК-сигнал должен генерироваться на уровне центральной частоты полосы пропускания устройства и модулироваться пакетами от 10 до 70 циклов с определенным промежутком после каждого цикла, как показано на следующем рисунке.

Изображение выше ясно показывает, что ИК-луч от Tx должен иметь импульс с центральной частотой IC, которая обычно составляет от 30 кГц до 39 кГц, и модулироваться пакетами с интервалом 10 мс.
TSOP реагирует на этот сигнал центральной частоты и запускается, создавая повторяющуюся форму волны на своем выходе, при этом 38 кГц выровнены в пакеты обычных прямоугольных импульсов.
Эта сложная рабочая форма волны обеспечивает повышенную устойчивость к множеству паразитных частот, которые могут присутствовать в атмосфере, исходящей от лампочек, люминесцентных люминесцентных ламп, люминесцентных ламп и т. Д.
Недостаток датчиков TSOP17XX
Хотя датчик обеспечивает надежную работу из-за этой сложной схемы приема сигнала, фиксированная центральная частота для датчиков TSOP ограничивает их использование только этим конкретным частотным диапазоном, что делает невозможным создание уникальных настраиваемых схем ИК-дистанционного управления с использованием этих микросхем.
Из-за этого недостатка системой дистанционного управления на основе TSOP обычно можно управлять с помощью любого обычного пульта дистанционного управления для телевизора или DVD, а также с помощью любой из кнопок на блоке управления.
Однако в электронике всегда есть обходной путь для всего, и для этих датчиков мы также можем создать дизайн, который позволит нам использовать IC с выбранной уникальной частотой по нашему выбору, чтобы приемник переключался только через определенную совместимую пару Tx, и не с любым доступным обычным пультом дистанционного управления.
Разработка уникальной схемы дистанционного управления TSOP на основе частоты
Из приведенного выше обсуждения мы поняли, что датчикам на основе TSOP для работы требуются пакеты с частотой 38 кГц или указанной центральной частотой, что указывает на то, что сигнал включает две частоты, на которых центральная частота постоянна, но частота пакета является переменной, а не критической. .
Идея состоит в том, чтобы захватить эту частоту всплеска в нашу пользу и использовать фильтр, который может распознавать эту частоту для запуска выхода.
Схема фильтра может быть легко спроектирована с использованием Схема тонального декодера LM567 , и использовать его для декодирования конкретной частоты пакетов с выхода датчика TSOP на стороне приемника.
Основную концепцию можно увидеть на следующей диаграмме.
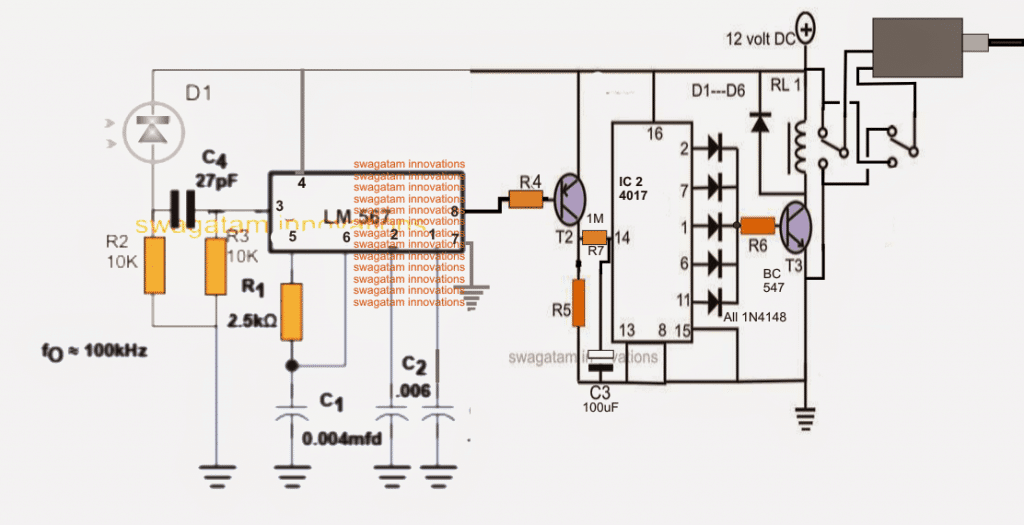
Принципиальная электрическая схема 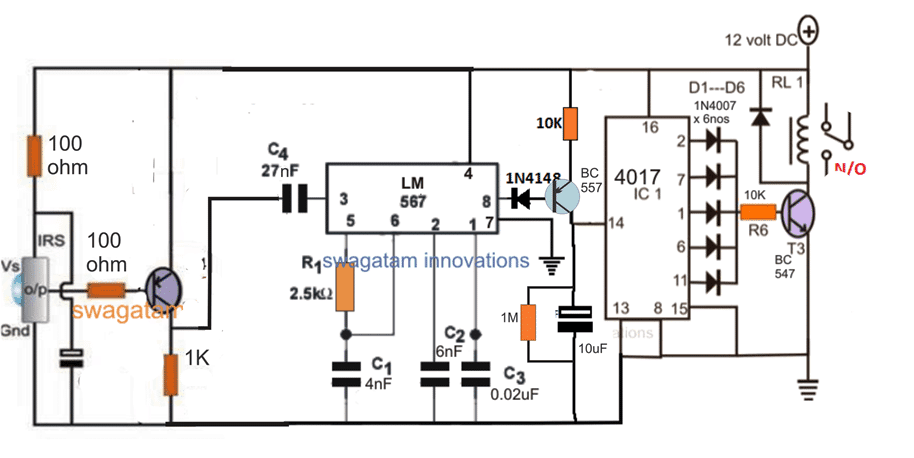

Схема работы
Обращаясь к приведенной выше принципиальной схеме для реализации TSOP17XX с настраиваемыми частотами, мы видим, что он состоит из 3 основных этапов:
- сенсорный столик TSOP17XX
- каскад частотного детектора на базе LM567
- и каскад с триггером или бистабильной схемой на базе IC 4017.
Каскад TSOP17XX сконфигурирован в своем стандартном режиме, который принимает модулированную частоту 38 кГц от блока Tx передатчика и создает импульсную прямоугольную волну, как показано на первой диаграмме.
Можно ожидать, что этот выходной сигнал TSOP будет нести интересующую нас частоту всплеска. Это может быть установлено на 1 кГц, 2 кГц или любое другое значение ниже 10 кГц.
Теперь мы хотим, чтобы наш каскад тонального декодера LM567 правильно обнаруживал эту модулированную частоту, поэтому мы должны убедиться, что R1 / C1 каскада LM567 рассчитывается так, что внутренний генератор фиксируется на той же частоте, что соответствует всплескам частоты модуляции с выхода TSOP. .
Как только эти параметры установлены, мы можем ожидать, что LM567 зафиксируется, как только выбранная частота будет обнаружена с выхода TSOP78XX, в то время как любая другая частота модуляции просто отклоняется.
При обнаружении правильно назначенной частоты выход LM567 генерирует соответствующий низкий сигнал запуска на своем выводе №8, активируя подключенный входной контакт №14 триггера на базе микросхемы IC 4017 через PNP.
Таким образом, мы можем назначать различные уникальные частоты, гарантируя, что запуск приемника будет разрешен только через соответствующую трубку Tx, а не с какого-либо обычного пульта дистанционного управления телевизором.
Изготовление индивидуальной схемы передатчика (Tx)
В приведенном выше обсуждении мы узнали, как датчик TSOP17XX может работать с настраиваемой частотой с использованием каскада частотного детектора, однако это также означает, что передатчик (Tx) также должен быть построен специально для генерации настраиваемых ИК-сигналов.
На следующем рисунке показано, как это можно реализовать с помощью одной микросхемы IC 4049 и нескольких пассивных элементов:

Все 6 затворов взяты из IC 4049, R3 может быть резистором 10 кОм, а предустановки могут быть 100 кОм. Колпачки C1 нужно будет выбрать после некоторых практических экспериментов. Диодом может быть 1N4148, остальные резисторы могут быть 2K2.
Как можно видеть, верхняя пара ворот вместе с R3, preset и C1 сконфигурирована как генератор свободного хода, нижняя секция также имеет идентичный каскад.
Верхняя секция подается на промежуточный буферный затвор, выход которого окончательно соединен с ИК-фотодиодом передатчика.
Вся секция сконфигурирована для генерации базовой центральной частоты для совместимости с TSOP17XX, которая может варьироваться от 32 кГц до 38 кГц в зависимости от характеристик выбранного датчика.
Предполагается, что нижний генератор представляет собой низкочастотный модулирующий каскад, который можно увидеть интегрированным с верхней частью через диод. Эта низкая частота переключает верхнюю высокую частоту, чтобы генерировать необходимые «всплески 38 кГц» на диоде ИК-передатчика.
Эта низкая частота фактически становится нашей уникальной частотой или намеченной настраиваемой частотой дистанционного управления, которая должна быть согласована с частотой LM567, чтобы обе частоты «пожимали руки» во время ИК-связи между модулями Tx и Rx.
Низкую частоту можно выбрать в диапазоне от 1 кГц до 10 кГц, и этот выбранный диапазон должен быть точно установлен для каскада LM567 путем соответствующей настройки его значений R1 / C1.
На этом мы завершаем обсуждение того, как модифицировать схему датчика TSOP17XX для приспособления к индивидуальным специальным частотным диапазонам или уникально выбранным частотным диапазонам, чтобы сделать систему дистанционного управления абсолютно надежной и индивидуальной.
Если у вас есть какие-либо сомнения относительно концепции, поле для комментариев в вашем распоряжении!
Предыдущая: Введение в датчик цвета RGB TCS3200 Следующая статья: Схема детектора цвета с кодом Arduino