В сообщении объясняется простая схема обхода препятствий роботу без микроконтроллера и без использования специальных схем драйвера двигателя или микросхем. Идея была предложена г-ном Файиязом.
Дизайн
В основном это в виде движущийся автомобиль который способен обнаруживать и избегать потенциальных препятствий на своем пути и соответствующим образом изменять свое направление, чтобы его движение оставалось непрерывным и простым!
Таким образом, операция выполняется автоматически без какого-либо ручного или человеческого вмешательства.
Представленная идея робота для обхода препятствий без микроконтроллера, как следует из названия, не использует микроконтроллер и, следовательно, чрезвычайно проста в сборке и подходит любому начинающему любителю.
При разработке схемы я понял, что для реализации принципа потребуется по крайней мере пара модулей датчиков препятствий, потому что использование одного модуля может вызвать беспорядочное движение двигателя и не может помочь плавному отклонению или повороту транспортного средства в сторону. свободный путь.
Настройка мотора автомобиля очень похожа на игрушечный автомобиль с дистанционным управлением который я обсуждал в одном из предыдущих постов.
На следующей схеме представлен один из модулей системы, поэтому потребуется два или пара таких модулей с правой и с левой стороны транспортного средства.
Идея проста и работает без микроконтроллера и без специальных микросхем драйверов двигателя. Это означает, что вы можете сделать это без какого-либо кодирования и без использования какой-либо сложной микросхемы драйвера двигателя ... и схема позволяет вам использовать любой двигатель постоянного тока независимо от его мощности, поэтому даже автомобили с высокой мощностью обхода препятствий могут быть сделано с использованием этой схемы, которая обычно используется в торговых центрах и аналогичных торговых точках.
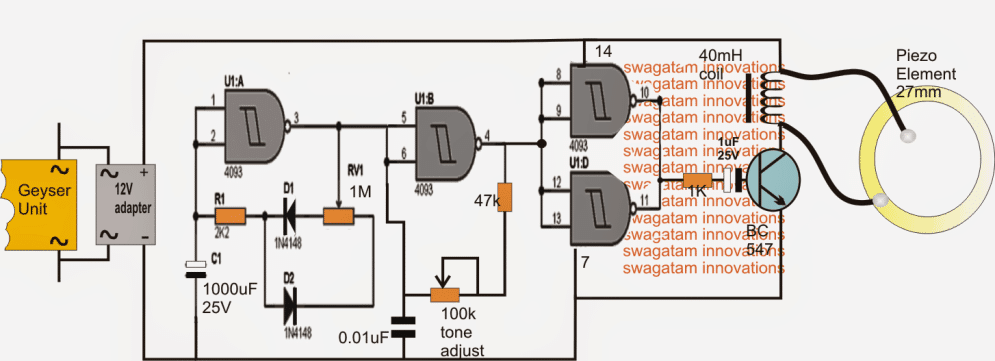
Принципиальная электрическая схема

Теперь давайте попробуем разобраться в приведенной выше схеме с помощью следующего пояснения:
Как это устроено
IC 555 сконфигурирован как ИК-передатчик и настроен на создание постоянной частоты 38 кГц, в то время как смежная транзисторная схема сконфигурирована как каскад приемника или каскад ИК-датчика.
Предположим, что это правый модуль, и предположим, что этот модуль первым обнаруживает препятствие на пути.
Поэтому, как только препятствие обнаруживается, частота 38 кГц, генерируемая микросхемой 555 IC, отражается в сторону датчика соседней схемы приемника.
Приемник мгновенно активирует связанные транзисторы, так что конечный транзистор драйвера не проводит ток.
Предполагается, что двигатель, которым управляет этот транзистор, расположен на левой стороне транспортного средства, то есть на противоположной стороне этого модуля ... аналогично, двигатель, расположенный на правой стороне, фактически управляется левым модулем. .
Следовательно, когда вышеупомянутый предполагаемый правосторонний модуль детектора препятствий активируется, он останавливает левый двигатель, в то время как правый двигатель может двигаться нормально.
Эта ситуация приводит к тому, что транспортное средство вынуждено отклоняться влево ... что означает, что теперь предполагаемый левый модуль начинает получать еще более сильные сигналы препятствия и продолжает заставлять автомобиль двигаться более интенсивно при продолжающемся отклонении, пока он полностью не уклонится от препятствия . Теперь модуль перестает получать сигналы о препятствиях, и автомобиль начинает нормально двигаться вперед по новому пути.
В то время как вышеупомянутое отклонение выполняется, левый боковой модуль вынужден становиться все более и более изолированным и отдаляться от препятствия, чтобы у него не было возможности вмешиваться в процедуру и обеспечить чистое и плавное отклонение транспортного средства.
Точно такие же процедуры выполняются в случае, если левый модуль обнаруживает препятствие перед правым модулем, при этом транспортное средство вынуждено двигаться все сильнее и сильнее в правую сторону.
Мы также можем видеть «отключение» схемного каскада в модуле, которые связаны между собой между левым и правым модулями. Этот этап введен специально для того, чтобы оба модуля никогда не активировались вместе.
Поэтому, например, если левый боковой модуль первым обнаруживает препятствие, он немедленно отключает правый боковой модуль и инициирует отклонение транспортного средства справа и наоборот.
ИС датчика может быть стандартная серия TSOP17XX
Для получения дополнительной информации о вышеуказанной ИС датчика вы можете узнать как подключить микросхему TSOP1738
И мотор должен быть оборудован коробками передач, чтобы движение изначально поддерживалось на контролируемом уровне.
Установка колес
Полную установку левого и правого модуля и соответствующие электрические соединения можно увидеть на рисунке ниже:

Обновлять
Немного подумав, мы можем сказать, что описанная выше простая схема робота для избегания препятствий также может быть реализована с использованием одного модуля вместо двух.
Однако один модуль позволит транспортному средству выполнять одностороннее отклонение каждый раз, когда оно обнаруживает препятствие, поэтому система может быть настроена на отклонение по часовой стрелке или против часовой стрелки, в зависимости от того, какой двигатель подключен к цепи для действий.
Пример настройки можно визуализировать на следующем изображении:

Однако, похоже, есть одна проблема с вышеупомянутой настройкой одного двигателя. Предположим, автомобиль встречает прямоугольный угол с левой стороны. Это заставит транспортное средство продолжать движение против часовой стрелки, пока оно не сделает разворот и не начнет движение назад в том же направлении, с которого он стартовал. Это не то, что пользователь оценил бы.
Предыдущая статья: Резисторы SMD - Введение и работа Далее: Как работает акселерометр