
В вычислениях интерфейс CAN может быть общей границей между двумя отдельными частями информации системного диалога. Разговор может осуществляться между компьютерным оборудованием, программным обеспечением, людьми, периферийными устройствами и их комбинациями. Некоторые аппаратные устройства компьютера, такие как сенсорный экран, потому что сенсорный экран может передавать и получать информацию через интерфейс, тогда как другие устройства, такие как микрофон, мышь, работают только в одном направлении. Интерфейсы в основном бывают двух типов такие как аппаратный интерфейс и интерфейс программного обеспечения. Аппаратные интерфейсы используются во многих устройствах, таких как устройства ввода, вывода, шины и устройства хранения. Этот интерфейс CAN можно определить с помощью логических сигналов. Программный интерфейс может быть доступен в широком диапазоне на разных уровнях. ОС может взаимодействовать с различными частями оборудования. Программы или приложения на ОС может потребоваться связь через потоки и в объектно-ориентированном программировании объекты в любом приложении должны взаимодействовать с помощью методов.

CAN BUS
Шина CAN была разработана в 1983 году в компании Robert Bosch GmbH. Этот протокол был опубликован в 1986 году на Конгрессе SAE (Общество автомобильных инженеров) в Детройте, штат Мичиган. Первый CAN протокол был произведен Philips и Intel и выпущен на рынок в 1987 году. Но BMW серии 8 был первым автомобилем, оснащенным системой мультиплексной проводки на основе протокола CAN.

CAN BUS
Полная форма CAN - это сеть контроллеров . Это один из видов автобуса, в основном предназначенный для различных устройства и микроконтроллеры взаимодействовать друг с другом без главного компьютера. Этот протокол основан на сообщении и в основном предназначен для электропроводки в автомобилях. Bosch выпустил различные версии CAN, а в 1991 году была опубликована последняя версия CAN 2.0.
CAN состоит в основном из двух частей, таких как часть A и часть B, где часть A представляет собой 11-битный идентификатор и имеет стандартный формат. Часть B - это 29-битный идентификатор в расширенном формате. CAN, которая использует 11-битные идентификаторы, называется AN 2.0A, а CAN, которая использует 29-битные идентификаторы, называется CAN 2.0B.
Подключение CAN к USB
Подключение CAN к USB - это простое устройство, используемое для мониторинга шины CAN. В этом устройстве используется микропроцессор NUC140LC1CN 32K Cortexes-M0. Он имеет периферийные устройства CAN и USB.
Основные особенности подключения CAN к USB:
- Дизайн очень прост
- Хорошо сочетается с протокол АДВОКАТ CANUSB
- Выставляя себя как устройство вроде FTDI USB
- Он поддерживает CAN 2.0B 29-битные и CAN 2.0A 11-битные кадры
- Он состоит из внутреннего буфера сообщений (FIFO CAN)
- Питание от USB-порта
- Для обновлений прошивки используется запоминающее устройство (резидентная флеш-память USB).
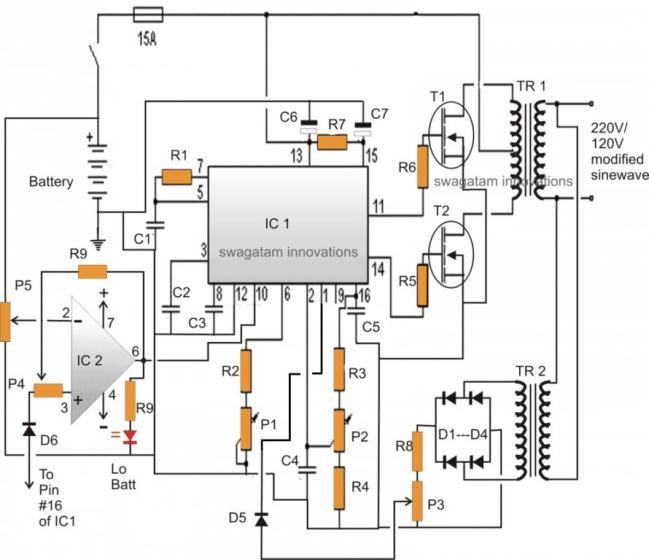
Схематическая диаграмма
Конфигурация схемы подключения CAN к USB показана ниже. Трансформатор CAN используется для того, чтобы устройство CAN NUC140 могло взаимодействовать с шиной CAN. Чип TJA1051T решает задачу от NXP. Микропроцессор NUC140 может работать от источника питания 5 В, нет необходимости в дополнительном стабилизаторе напряжения 3,3 В. Такое удобное расположение упрощает реализацию интерфейса CAN-USB.

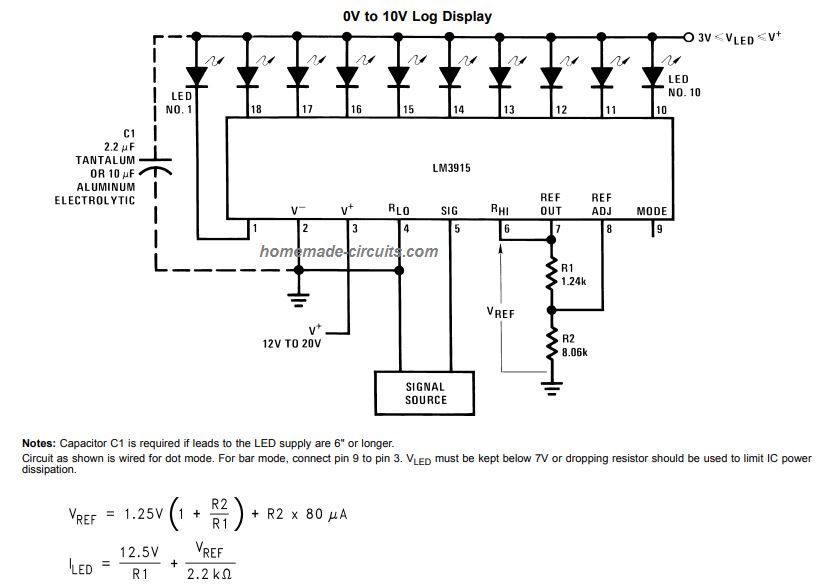
Схематическая диаграмма
Схема состоит из трех светодиодов состояния, а именно D1, D2 и D3.
- Здесь состояние диода D1 говорит о том, что USB подключен к хосту
- Здесь состояние диода D2 говорит о том, что активность CAN-шины
- На ошибки CAN-шины может указывать диод D3.
Микропроцессор NUC140 не имеет встроенного загрузчика, и лучший способ программирования - использовать только программатор Nuvoton ICP и РУКА SWD (Serial Wire Debug) интерфейс. Если загрузчик предварительно сбрасывается с программой, он может сработать. Подключение JP1 до подачи питания на интерфейс запустит загрузчик.
Загрузчик
Флэш-память микропроцессора NUC140LC1 разделена на две части. Они исполняют программный код пользователя и загрузчик. Размер загрузчика и исполняемой пользовательской программы составляет 4 КБ и 32 КБ. Здесь загрузчик запоминающего устройства (MSD) от Nuvoton используется для создания полнофункционального загрузчика USB. Загрузчик активируется при подключении перемычки JP1. Наконец, в файловой системе хоста должен быть виден съемный диск размером 32 КБ. Просто скопируйте и вставьте обновление прошивки CAN to USB на диск загрузчика. Отсоедините кабель USB, отсоедините перемычку и снова вставьте вилку. Теперь должно начаться обновление новой прошивки.

Загрузчик
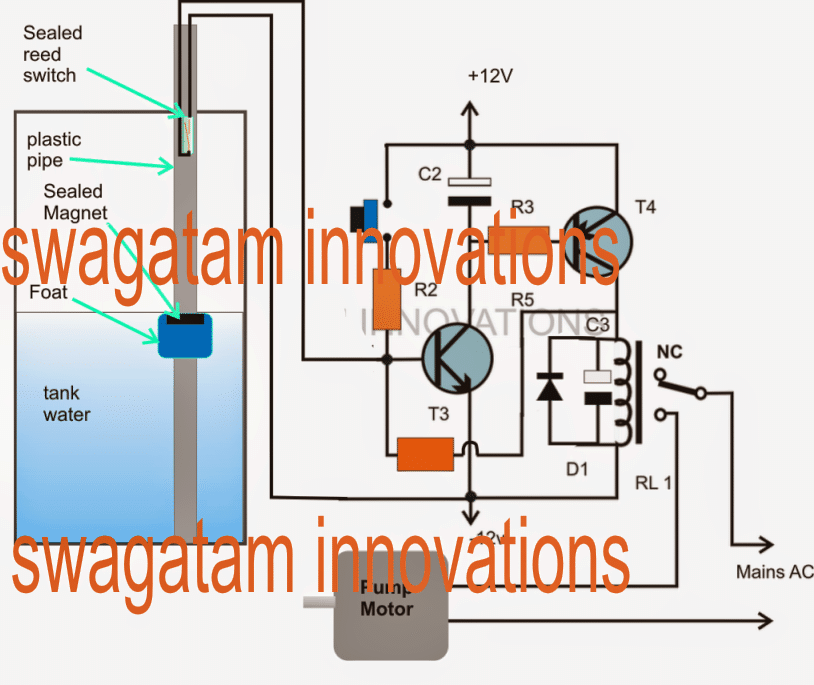
Программирование интерфейса CAN-USB и NuTiny-SDK-140
Программирование микропроцессора NUC140 требует программного обеспечения Nuvoton ICP и программатора Nu-Link Nuvoton. Но здесь NuTiny-SDK-140 (демонстрационная плата NUC140) доступен от Digi-Key. Он состоит из двух частей, таких как программаторы Nu-Link и части с микросхемой NUC140. Эта плата даже перфорирована, чтобы отделить часть Nu-Link. Фактически, вы можете спроектировать это устройство исключительно на демонстрационной плате NUC140, потребуется только дополнительная микросхема трансивера CAN.

Плата NUC140
Таким образом, речь идет об интерфейсе CAN с USB, шине CAN, подключении CAN к USB, принципиальной схеме, загрузчик и микропроцессор NUC140. Мы надеемся, что вы лучше понимаете эту концепцию. Кроме того, любые вопросы относительно этой статьи, пожалуйста, дайте свои ценные предложения, комментируя в разделе комментариев ниже. Вот вам вопрос, каково применение CAN интерфейса?
Фото:
- Интерфейс CAN-USB Saelig
- CAN BUS канбускит
- NUC140 инструкции





{kind=link}
{kind=link}
{kind=link}