Первая успешная оценка теории ПИД-регулирования была практически проверена в области автоматических систем рулевого управления для судов еще примерно в 1920 году. После этого она стала применяться в различных промышленных автоматических системах управления процессами, требующих оптимизированных и точных производственных характеристик. Для производственных единиц ПИД был широко применен для достижения точного пневматического управления, и в конечном итоге теория ПИД была применена в электронных контроллерах в наше время.
Что такое ПИД-регулятор
Термин PID является аббревиатурой от пропорционального интегрального производного контроллера, который представляет собой механизм контура обратной связи, разработанный для точного управления различными механизмами промышленного управления и многими другими подобными приложениями, которые требуют критического и автоматического управления модуляцией.
Для реализации этого ПИД-регулятор непрерывно контролирует работу системы и вычисляет элемент наведенной ошибки. Затем он оценивает это мгновенное значение ошибки в виде разницы между требуемой уставкой (SP) и измеренной переменной процесса (PV).
Со ссылкой на вышесказанное, мгновенная и автоматическая коррекция обратной связи выполняется в терминах пропорционального (P), интегрального (I) и производного (D) выражений, отсюда и название «ПИД-регулятор».
Проще говоря, ПИД-регулятор непрерывно контролирует работу данной системы машины и продолжает корректировать свою выходную реакцию в зависимости от изменений, вызванных внешними воздействиями, с помощью заданного алгоритма. Таким образом гарантируется, что машина всегда работает в установленных идеальных условиях.
Понимание блок-схемы ПИД-регулятора
ПИД-регулятор считается универсальной системой управления из-за его способности обнаруживать и управлять 3 параметрами управления: пропорциональным, интегральным и производным, а также применять намеченное оптимальное управление на выходе с предельной точностью со ссылкой на эти 3 параметра.
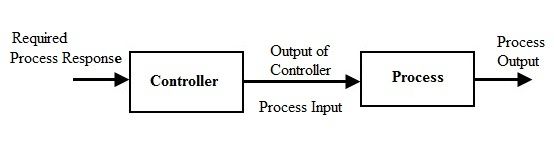
На изображении ниже показана блок-схема PID. Мы можем быстро понять основной принцип работы PID, обратившись к этой блок-схеме.

Изображение предоставлено: en.wikipedia.org/wiki/File:PID_en.svg
Здесь мы можем увидеть набор переменных, таких как e (t), соответствующий значению ошибки, r (t), соответствующий целевой уставке, и y (t), как измеряемая переменная процесса. ПИД-регулятор на протяжении всей своей работы отслеживает значение ошибки e (t), оценивая разницу между заданным значением r (t) или SP и измеренным значением процесса y (t) или PV, и, следовательно, выполняет коррекцию обратной связи или оптимизацию с использованием параметров а именно: пропорциональная, интегральная и производная.
Контроллер продолжает прилагать усилия для уменьшения эффекта ошибки на всем протяжении, регулируя управляющую переменную u (t) на свежие значения на основе проанализированной взвешенной суммы управляющих членов (p, I, d).
Например, при работе клапана управления его открытие и закрытие может непрерывно изменяться с помощью PID посредством комплексных оценок, как объяснено выше.
В показанной системе можно понимать различные термины, как описано ниже:
P- Контроллер:
Член P пропорционален мгновенным значениям ошибки e (t), полученным при оценке результата для SP - PV. В ситуации, когда значение ошибки имеет тенденцию к увеличению, управляющий выходной сигнал также увеличивается пропорционально коэффициенту усиления «K». Однако в процессе, требующем компенсации, например, при регулировании температуры, пропорциональное регулирование в отдельности может привести к неточностям в заданном значении и фактическом значении процесса, поскольку оно не может работать удовлетворительно без обратной связи по ошибке для генерации пропорционального отклика. Подразумевается, что без обратной связи об ошибке надлежащий отклик на исправление может быть невозможен.
I- Контроллер:
Термин I становится ответственным за ранее оцененные значения ошибок SP - PV и объединяет их в течение своего рабочего периода для создания члена I. Например, когда применяется пропорциональное управление, если SP - PV выдает некоторую ошибку, параметр I становится активным и пытается устранить эту остаточную ошибку. На самом деле это происходит при срабатывании управляющего отклика из-за накопленного значения ошибки, зарегистрированной ранее. Как только это произойдет, термин I перестанет усиливаться. Это приводит к тому, что пропорциональный эффект соответственно минимизируется по мере уменьшения коэффициента ошибки, хотя это также компенсируется по мере развития интегрального эффекта.
D- Контроллер:
Член D представляет собой наиболее подходящее приближение, выведенное для эволюционирующих тенденций для ошибки SP - PV, в зависимости от мгновенной скорости изменения коэффициента ошибки. Если скорость изменения быстро увеличивается, управление с обратной связью реализуется более агрессивно, и наоборот.
Что такое настройка PID
Обсуждаемые выше параметры могут потребовать правильной балансировки для обеспечения оптимальной функции управления, и это достигается посредством процесса, называемого «настройка контура». Используемые константы настройки обозначаются буквой «K», как показано в следующих выводах. Каждая из этих констант должна быть получена индивидуально для выбранного приложения, поскольку константы строго зависят и варьируются в зависимости от характеристик и влияния конкретных внешних параметров, задействованных в цикле. Они могут включать в себя реакцию датчиков, используемых для измерения данного параметра, последнего дросселирующего элемента, такого как регулирующий клапан, возможное время в сигнале контура и сам процесс и т. Д.
Может быть приемлемо использовать приближенные значения для констант в начале реализации в зависимости от типа приложения, однако в конечном итоге это может потребовать некоторой серьезной тонкой настройки и настройки посредством практических экспериментов, путем принудительного изменения заданных значений и последующего наблюдения за реакцией системный контроль.
Будь то математическая модель или практический цикл, можно увидеть, что оба они используют «прямое» управляющее воздействие для указанных условий. Это означает, что при обнаружении увеличения положительной ошибки инициируется соответствующее усиление положительного контроля для управления ситуацией для суммированных задействованных терминов.
Однако это может потребоваться изменить в приложениях, где выходной параметр может иметь противоположно сконфигурированную характеристику, требующую обратной корректирующей меры. Давайте рассмотрим пример контура потока, в котором процесс открытия клапана настроен на работу с использованием 100% и 0% выхода, но должен управляться с соответствующими выходными 0% и 100%, в этом случае обратное корректирующее управление становится важным. Чтобы быть более точным, рассмотрим систему водяного охлаждения, имеющую функцию защиты, в которой ее клапан должен быть открыт на 100% во время потери сигнала. В этом случае выход контроллера должен иметь возможность переключаться на регулирование 0% при отсутствии сигнала, чтобы клапан мог открываться на полные 100%, это называется регулированием «обратного действия».
Математическая модель функции управления.

В этой математической модели все неотрицательные константы Kp, Ki и Kd обозначают коэффициенты для пропорциональных, интегральных и производных членов соответственно (в некоторых случаях они также обозначаются P, I и D).
Настройка терминов ПИД-управления
Из приведенных выше обсуждений мы поняли, что в основном система ПИД-регулирования работает с тремя параметрами управления, однако некоторые более мелкие приложения могут предпочесть использовать пару этих терминов или даже один член из трех.
Настройка выполняется путем преобразования неиспользуемого термина в нулевое значение и включения пары терминов PI, PD или отдельных терминов, таких как P или I. Среди них конфигурация контроллера PI более распространена, поскольку термин D обычно подвержен шуму. влияет и поэтому устраняется в большинстве случаев, если это не является строго обязательным. Член I обычно используется, поскольку он обеспечивает достижение системой намеченного оптимального целевого значения на выходе.
Предыдущая: Как разработать обратный преобразователь - подробное руководство Следующая статья: Автоматический стабилизатор напряжения от 5 кВА до 10 кВА - 220 В, 120 В